C-RTK 2 PPK 高精度定位模块
- 同时支持 RTK & PPK;
- 支持热靴触发;
- 多星多频接收机;
- 25Hz 原始数据记录;




多星多频高精度定位
内置 u-blox F9P 多星多频卫星接收机,支持北斗、伽利略、格洛纳斯、GPS 四大卫星系统,并支持四卫星系统同时接收,定位精度 RTK 0.01m + 1ppm CEP。
GPS
格洛纳斯
伽利略
北斗
高性能 H7 处理器
C-RTK 2 采用 STM32H7 处理器,Cortex-M7 内核(带双精度浮点单元),运行频率高达 480MHz,2MB Flash,1MB RAM,运行实时系统,使得 C-RTK 2 高效稳定工作。
内置高精度工业级 IMU
C-RTK 2 内置高精度工业级的 ICM-20689 加速计&陀螺仪、RM3100 电子罗盘、ICP10111 气压计,可配置为智能控制器的外置 IMU 使用,并可将拍摄时的姿态,高程等丰富的信息记录在 POS 数据中。
RM3100 电子罗盘
ICP-10111 气压计
ICM-20689 加速计 & 陀螺仪
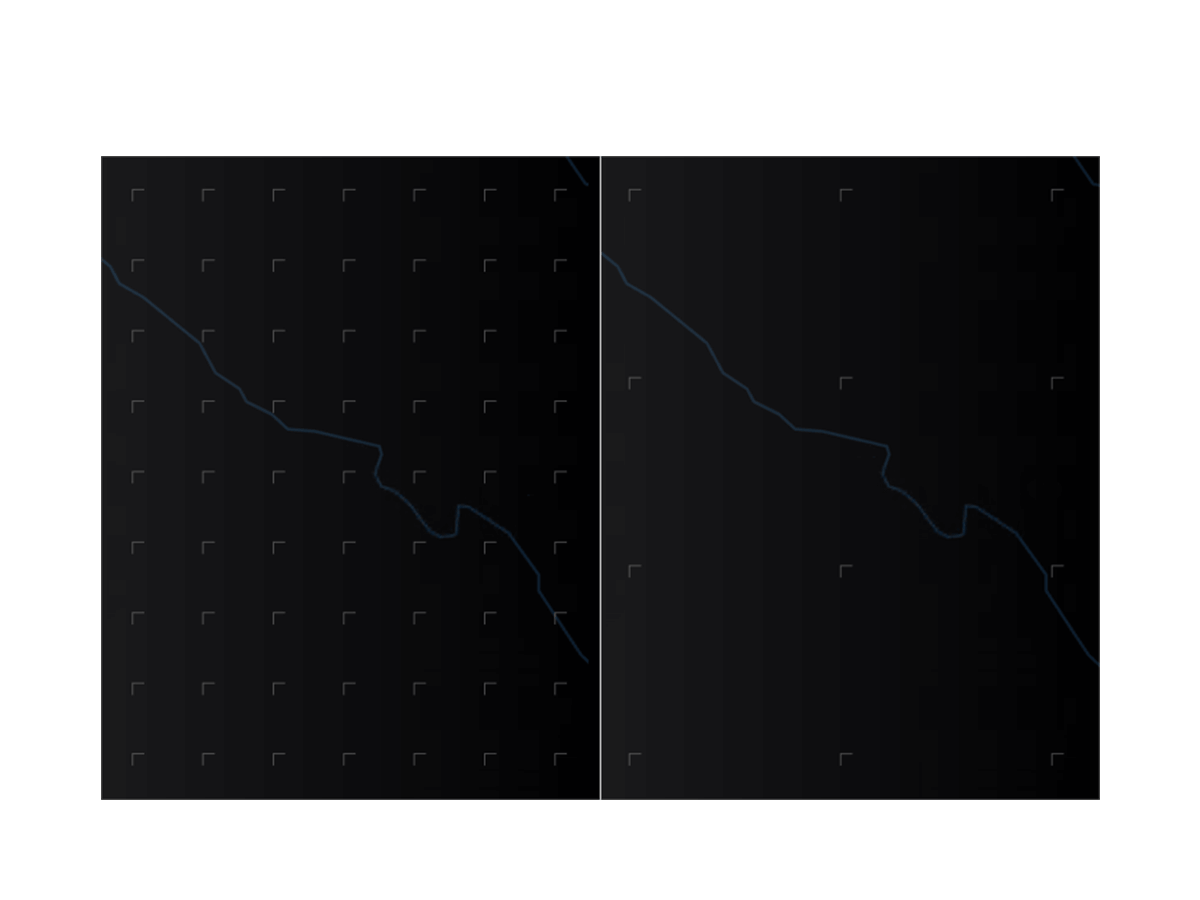
使用 C-RTK 2 前
使用 C-RTK 2 后
极减像控高效航测
使用 C-RTK 2 进行航测,可以减少 80% 以上的像控点,搭配专业航测相机使用,甚至可以实现免像控。
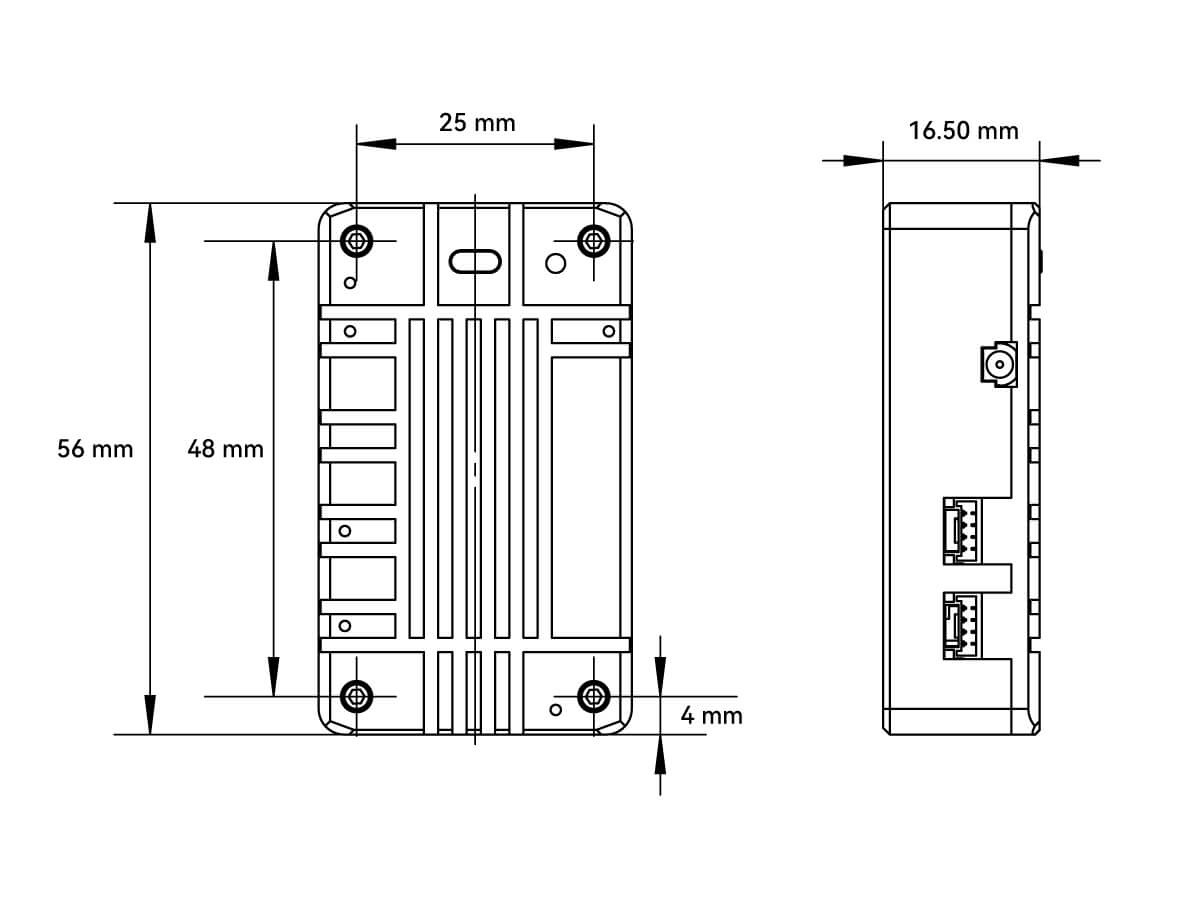
尺寸图
ArduPilot、Dronecode、PX4 长期合作伙伴
广州雷迅创新科技股份有限公司是一家以无人开源系统创新技术为向导,集成研发、生产、销售、售后、技术支持为一体的国家级高新技术企业和广东省专精特新企业,与 ArduPilot、Dronecode、PX4 是长期合作的友好关系。
支持 ArduPilot 和 PX4 固件
采购联系

李小姐
联系电话: 18122367336
覃小姐
联系电话: 18028643650