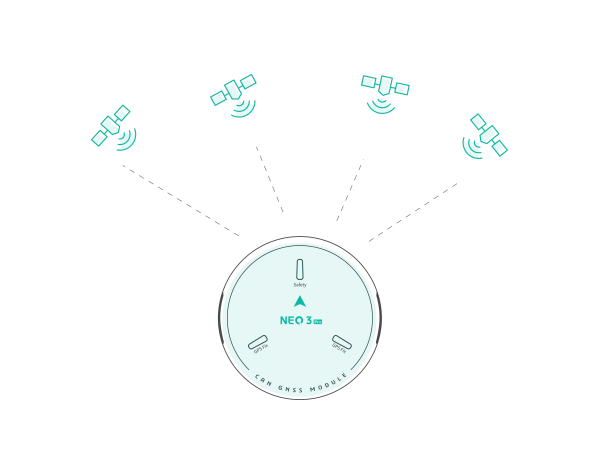
Supports simultaneous reception of signals from four major satellite systems (BeiDou, Galileo, GLONASS, GPS).
CAN bus communication protocol.
Ublox M9N Satellite receiver
New generation satellite receiver Ublox M9N.
RM3100 industrial sensor
Using RM3100 industrial grade sensor, has better anti-interference performance
Simultaneous reception by the four satellite systems
Supports simultaneous reception of BeiDou, Galileo, Glonas, and GPS four satellite systems
GPS
GLONASS
Galileo
BeiDou
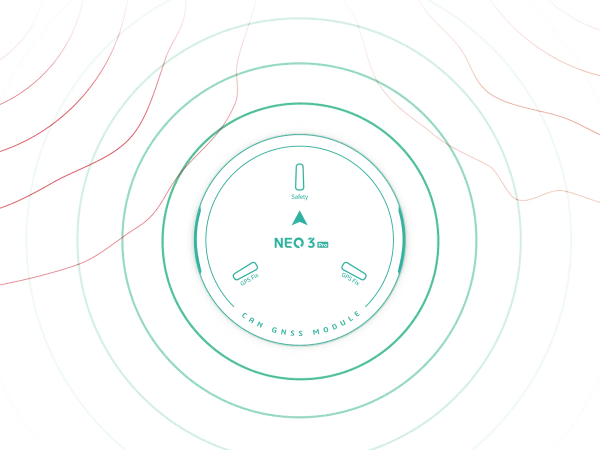
Triple filter design
NEO 3 Pro adopts SAW + LNA + SAW triple filter design, effectively avoiding the influence of remote control, data transmission, 4G signal on GPS positioning reception.
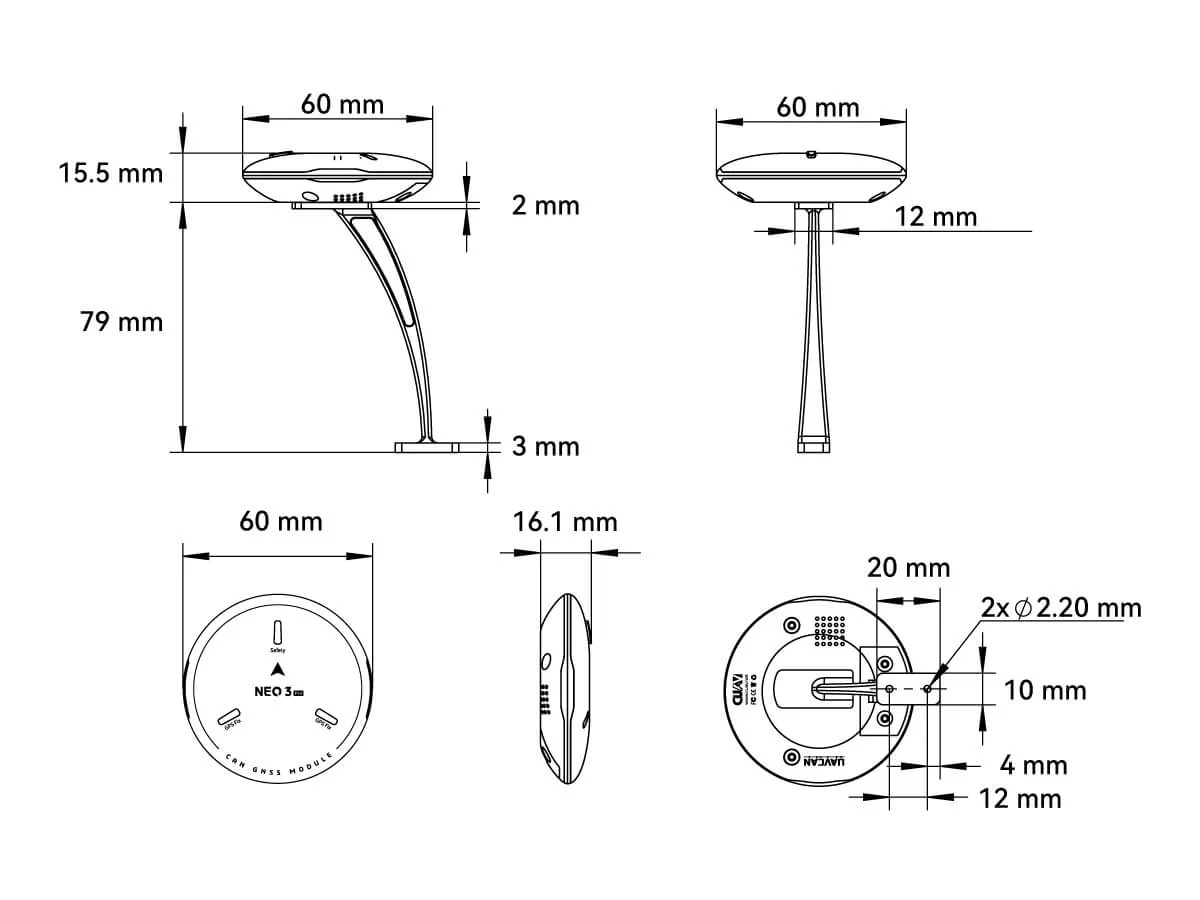
Dimensions chart
ArduPilot, Dronecode, and PX4 Long-Term Partners
CUAV Technology Co., Ltd. is a National High-Tech Enterprise and Guangdong Provincial Specialized, Sophisticated, Innovative SME that focuses on open-source unmanned system innovation technologies. It integrates R&D, production, sales, after-sales service, and technical support into a cohesive operation. The company maintains long-term collaborative partnerships with leading open-source organizations such as ArduPilot, Dronecode, and PX4.