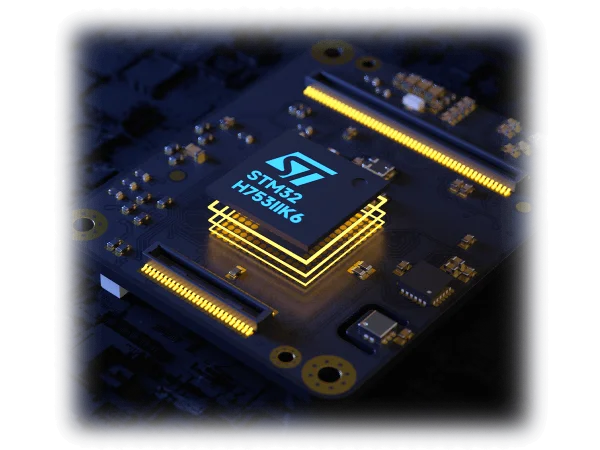
It adopts STM32H753IIK6 high-performance processor, paired with 480MHz double-precision floating-point unit and 2M Flash memory, which deliver powerful intelligent computing power to the system and support secure boot and secure firmware update services. During system operation, it features lower CPU usage and is compatible with complete drivers and functions of ArduPilot and PX4 (such as IMU temperature learning, non-GPS navigation, FFT filtering algorithm, and LUA scripting). It also provides ample space for subsequent development and new driver compatibility.