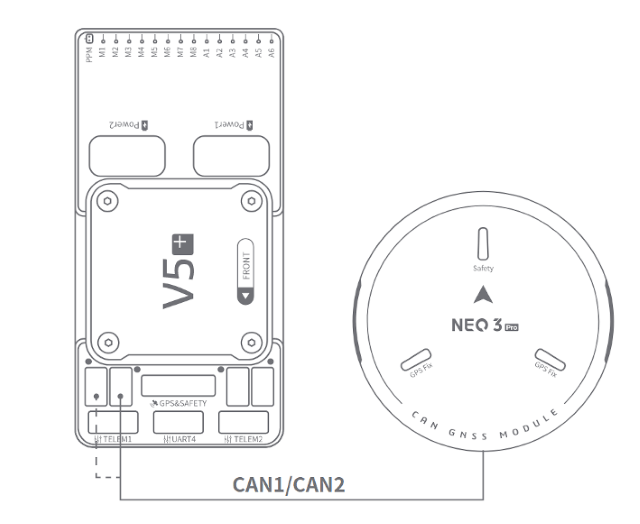
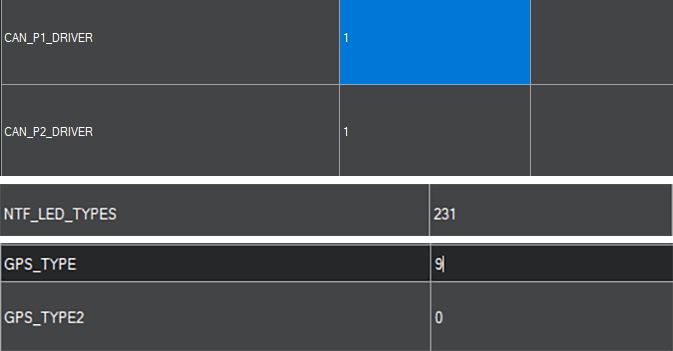
概述 规格参数 购买 下载 使用教程 回顶部 NEO 3 Pro GNSS全球卫星导航模块 UAVCAN通讯接口ublox M9N定位模块工业级RM3100电子罗盘北斗、Galileo、Glonas、GPS四卫星系统同时接收水平定位精度高达0.7M集安全开关、蜂鸣器、飞控状态灯 产品特点 蜂鸣器提示 安全开关保护 CAN总线 MS5611气压计 RGB状态灯 工业电子罗盘 Ublox M9N卫星接收器 新一代卫星Ublox M9N接收器,实测最高可达0.7m精度。 四卫星系统同时接收 支持北斗,Galileo,Glonas,GPS四卫星系统同时接收 高性能处理单元STM32F412高性能处理单元STM32F412 RM3100工业级传感器采用RM3100工业级传感器,拥有更优秀的抗干扰性能 002 CIROCOMM CROCOMM定制天线 特制四星高增益天线 内置高精度气压计 内置MS5611高精度气压计,满足不同的应用场景需求 三重滤波设计 NEO 3 Pro 采用SAW+LNA+SAW三重滤波设计,有效避免来自遥控器、数传、4G信号对GPS定位接收的影响 程序开源,支持自定义程序 NEO 3 Pro规格参数 主处理器 STM32F412 传感器 指南针: RM3100气压计 : MS5611 RGB驱动器 NCP5623C 蜂鸣器 无源蜂鸣器 安全开关 物理按键 卫星接收器 UBLOX第九代导航定位接收器(M9N) 并发器数量 4(同时支持北斗+GPS+伽利略+格洛纳斯) 工作频段 GPS: L1 C/A格格纳斯:L10F 北斗:B1I伽利略:E1B/C 卫星增强系统 SBAS:WAAS, EGNOS, MSASQZSS:L1s(SAIF)其它:RTCM3.3* 导航刷新率 25HZ(最高) 水平精度 2.0M(最高0.7m) 速度精度 0.05m/s 最大卫星数量 32颗+ 捕获速度 冷启动 24S再次捕获 2S辅助启动 2S 灵敏度 追踪 & 导航:-167dBM冷启动&热启动: -148dBM重新捕获: -160dBM 通信协议 UAVCAN 滤波 SAW+LNA+SAW 防电磁/射频干扰 EMI+RFI 固件升级 支持 支持飞控类型 CUAV系列飞控Pixhawk系列 接口类型 GHR-04V-S 工作电压 4.7~5.2V 工作温度 -10~70℃ 尺寸 60*60*16MM 重量 33g NEO 3水平精度开启SBAS增强系统时标称精度为1.5m(默认);关闭SBAS增强系统时为2.0m;水平精度非部分商家宣传的HDOP水平因子。水平精度:打点的误差范围(相对精度)HDOP:水平精度因子,表示卫星分布情况,一般情况下值越小表示卫星分布越好,遮挡越小,精度相对较好;但与水平精度没有直接对应关系。NEO 3支持注入RTCM3.3,不支持输出RTCM;可以实现伪距差分(米级定位)但不支持载波相位差分(RTK),并且需要支持输出RTCM3.3的基准站。 Ardupilot 4.0.0以上版本固件支持NEO 3 Pro,PX4固件尚处于适配阶段。 资料下载 NEO 3 Pro产品说明书下载 使用教程 连接到V5+ 连接到飞控CAN1/CAN2接口(推荐连接CAN1) 其它PX4飞控的连接与此相同。 飞控参数设置 使用前需要设置飞控参数启用Neo 3 pro;根据飞控的固件有不同设置方法. ArduPilot固件 在Mission planner的全部参数表设置以下参数并在写入后重启: CAN_P1_DRIVER 设置为1.CAN_P2_DRIVER 设置为1.NTF_LED_TYPES 设置为231.GPS_TYPE 设置为9(如果作为GPS1).