1. Optimize IMU design and integrate all sensors into imu module for better consistency
3. Intelligent identification of external compass direction to solve the troubles of setting up your abnormal orientation
4. Optimize support for CAN devices
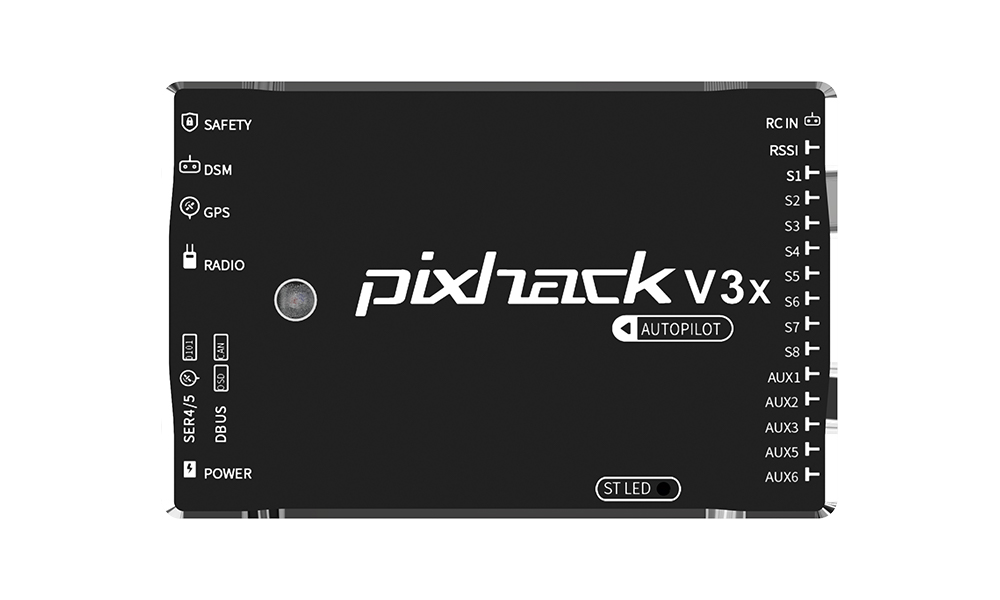
5. External interface output power upgrade (maximum support 3A/5V), to solve the trouble of high-power radio needs independent power supply
6. Support high precision electronic compass IST8310 7. Upgrade BootLoader to FMU v3 and run the full version of APM/PX4 firmware perfectly.