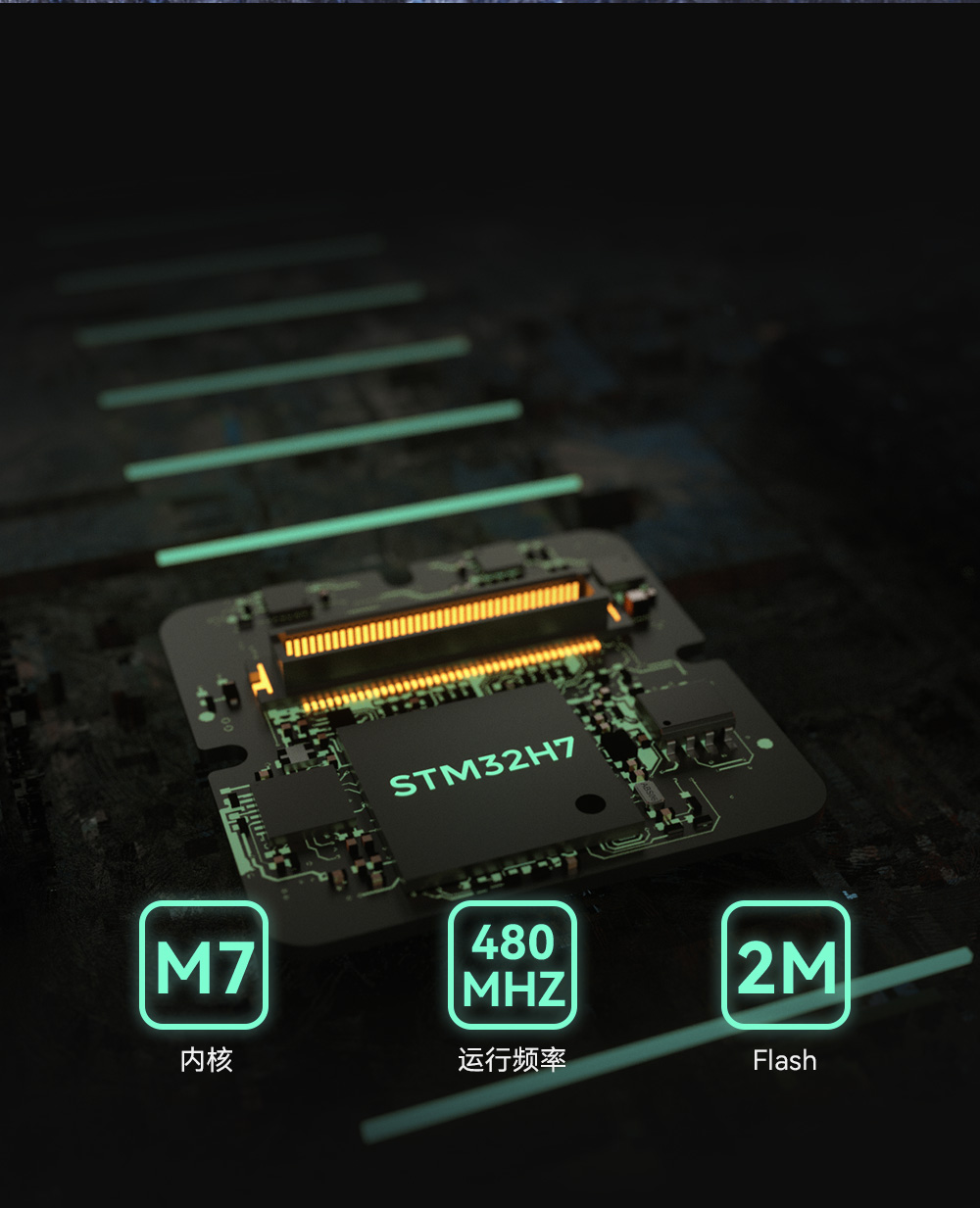
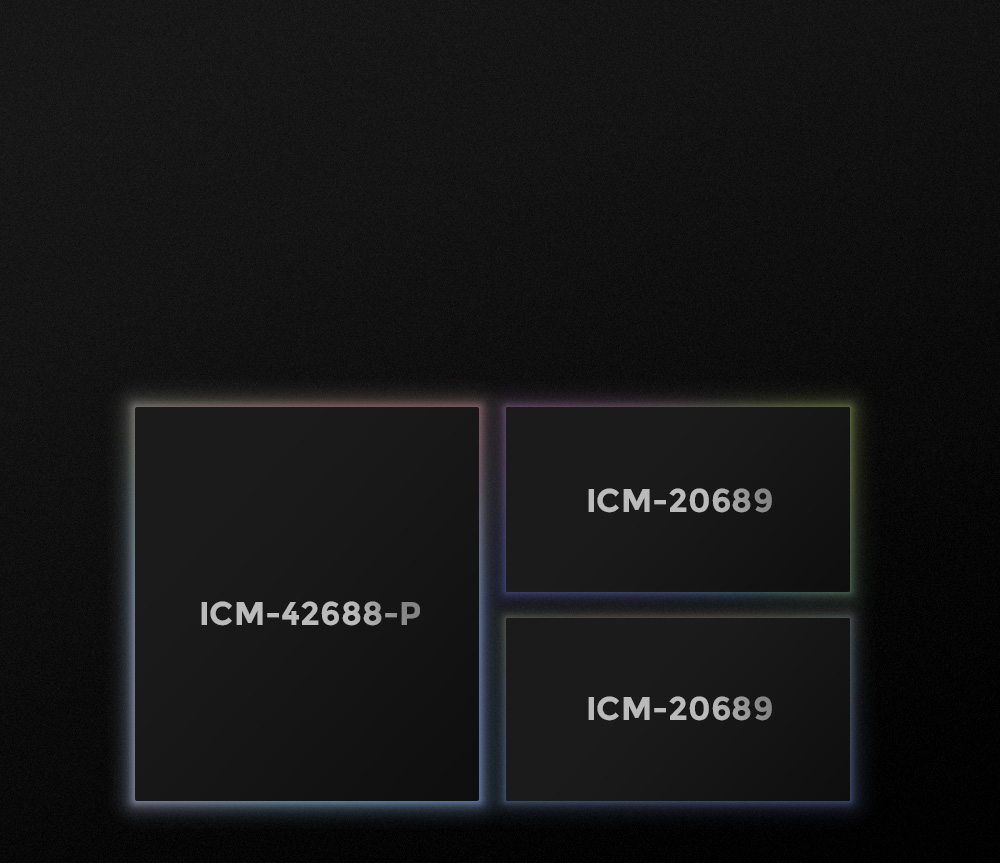
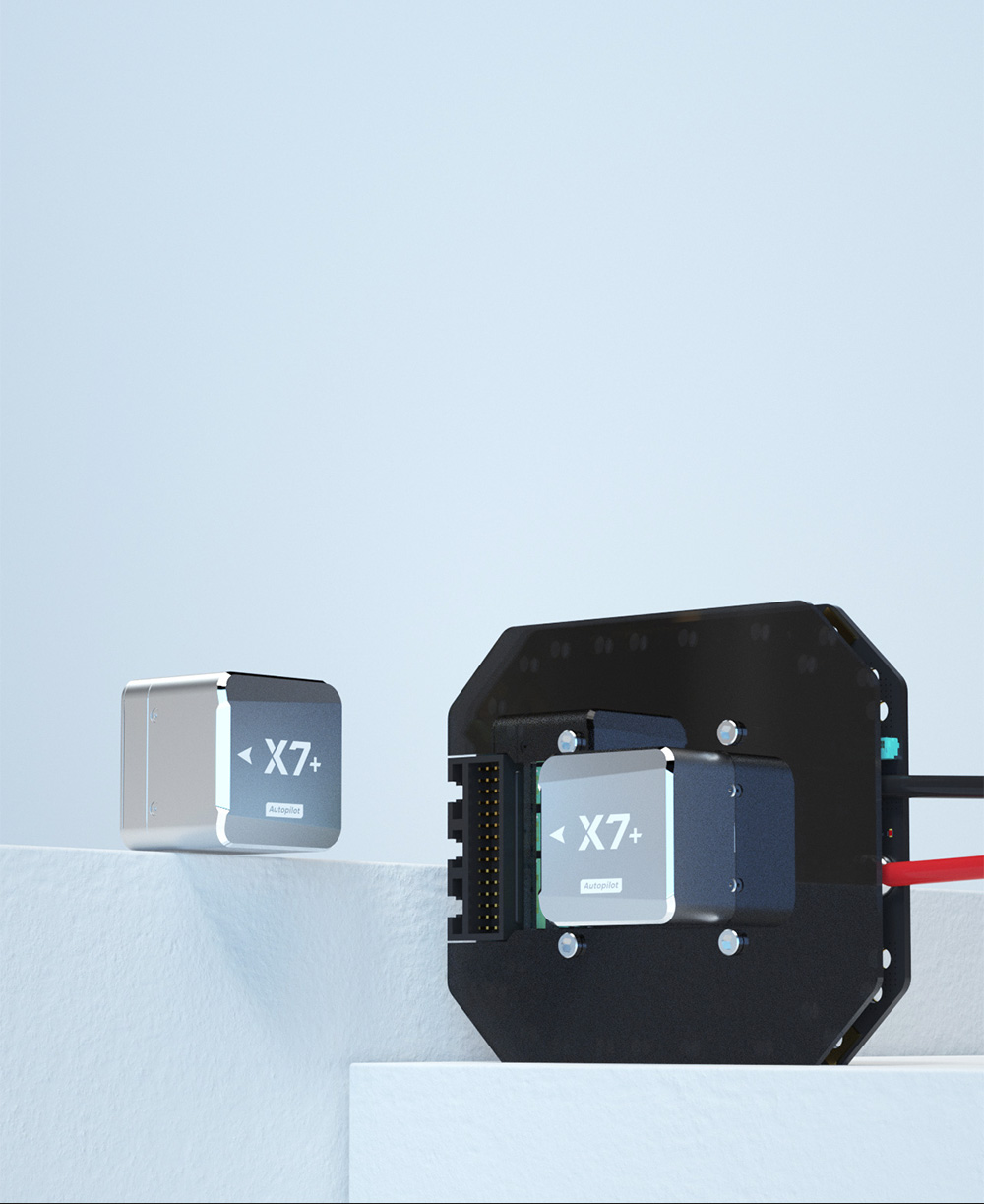
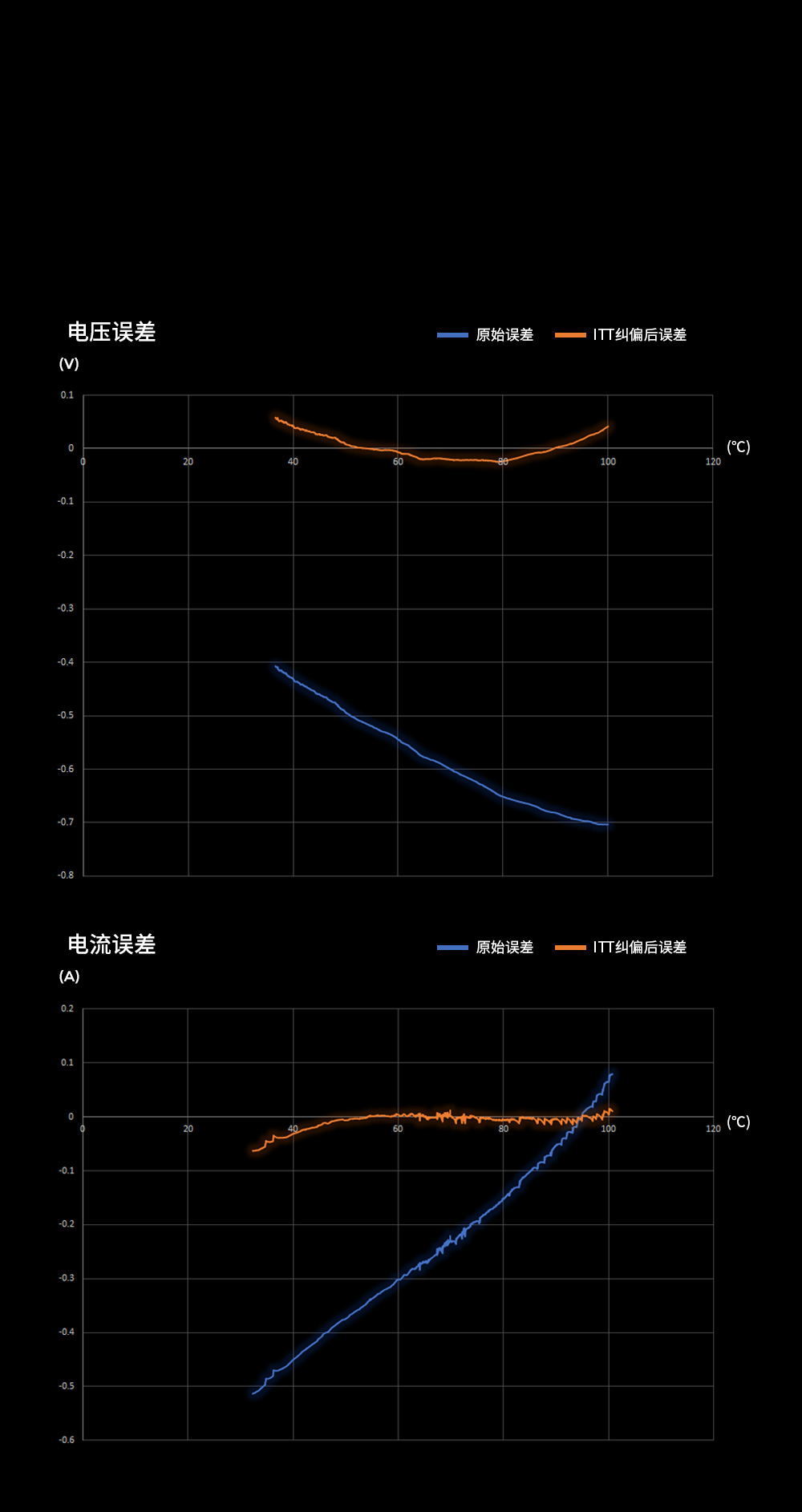
X7+控制器 焕“芯”而来 STM32H743处理器ICM-42688-P加速计&陀螺仪 RM3100工业级罗盘 H7处理器 性能强劲 采用STM32H743处理器, Cortex-M7 内核(带双精度浮点单元),运行频率高达480MHz,2MB Flash,1MB RAM,轻松应对控制器的运算需求。与STM32F7产品线相比,动态功耗效率提升两倍 传感器升级 传感器是评价控制器的重要指标之一,这一次,我们加入了ICM-42688-P传感器,与传统消费类IMU相比,噪声系数降低了40%,且温度稳定性提高了2倍,从而实现在温度变化的情况下确保以最高的精度测量 传感器冗余设计 内置三组加速计与陀螺仪,控制器实时监测多路传感器数据,若发生故障立即执行冗余切换,提高无人系统安全与稳定性 温度补偿系统 内置了高精度传感器温补系统,使得传感器在恒温的状态下进行工作,确保传感器在高低温环境下均能高精度、高灵敏度的稳定运行 CORE分离式设计 X7+控制器将主要MCU与IMU集成于CORE模块中,并可单独出售,用户可根据无人系统结构自行设计底板,满足用户的个性化需求,或购买我司的CAN PDB底板搭配使用。X7+ CORE接口与X7,X7 Pro,V5+控制器CORE兼容。 更优秀的专利减震系统 数十次迭代,上百种减震材料测试和验证,使用计算机模型分析并经过上千次系统测试,让X7+减震水平更进一步 标配数字电源模块 标配UAVCAN协议数字电源检测模块,采用CUAV自主研发ITT算法,精准测量无人系统实时电压和电流,让无人系统运行时间估算更可靠 支持LTE Link系列 4G图传数传 支持LTE Link 系列4G图传数传模块,使您的图像与数据不受距离限制的传输,并支持视频分享等 可选配RTK实现 厘米级定位 可选购CUAV的C-RTK系列产品,实现厘米级的定位,以应用在需要高精度定位的场景。如植保、测绘等 固件与机型支持 注:X7+控制器兼容ArduPilot 4.10/ PX4 1.12.3或更高版本的固件,不兼容低版本固件 硬件参数处理器STM32H743传感器 加速计ICM-42688-P/ICM-20689/ICM-20689陀螺仪ICM-42688-P/ICM-20689/ICM-20689电子罗盘RM3100气压计MS5611*2接口 UART串口5I2C6(两个单独的i2c接口,两个集成在GPS/uart 4接口)PWM输出14(其中12路支持dshot协议)RC IN1个,支持PPM/SBUS/DSMRSSI输入PWM或3.3模拟电压CAN标准总线2Power输入2(Power A为普通ADC电源检测接口;Power C为CAN电流计接口安全开关1GPS接口2(UART4可作为GPS2接口)ADC1Debug1JATG1USB接口1支持机型 Ardupilot PX4固件 工作环境及物理参数 PM工作电压4.5 ~ 5.5 VUSB电压4.75 ~ 5.25 V伺服输入0 ~ 36v工作温度-20 ~ 85°c工作湿度5%~95%(不凝结)重量101g