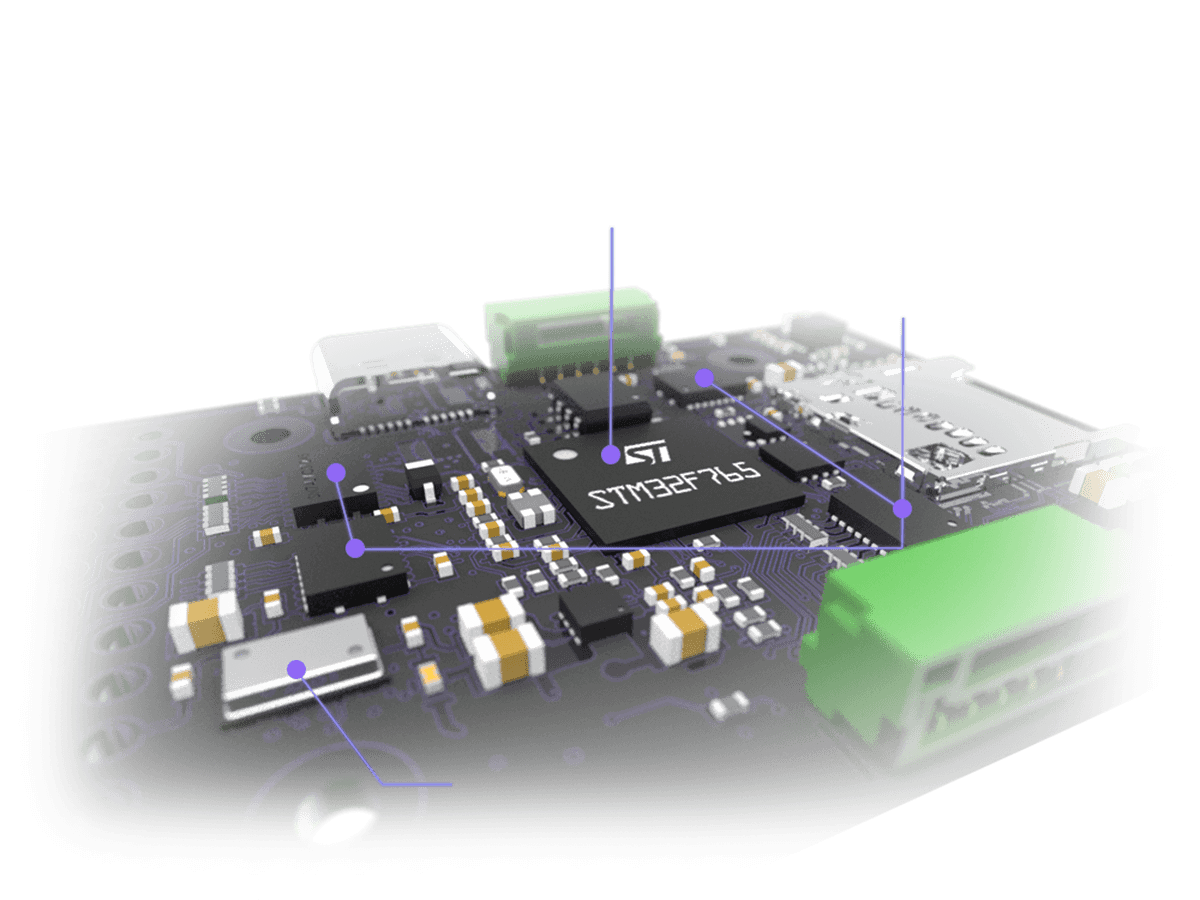
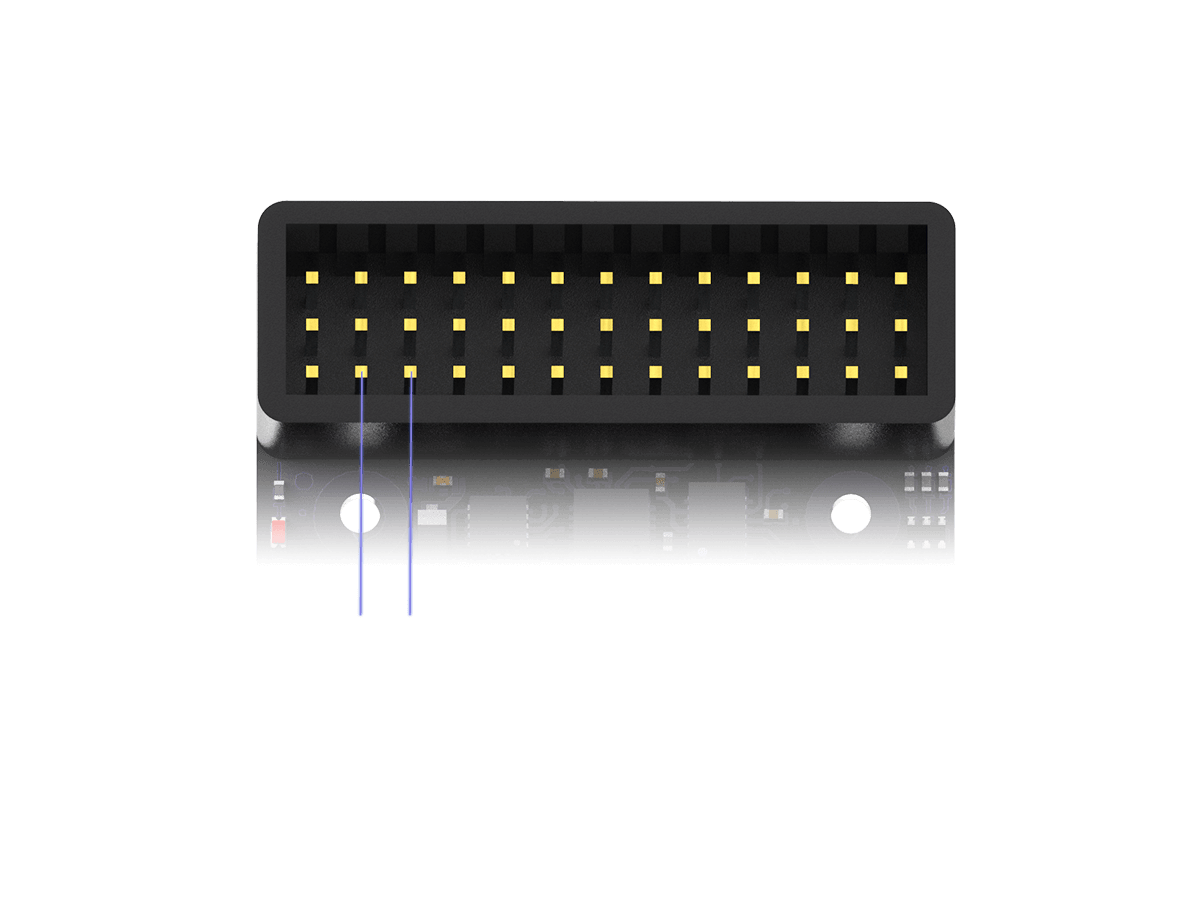
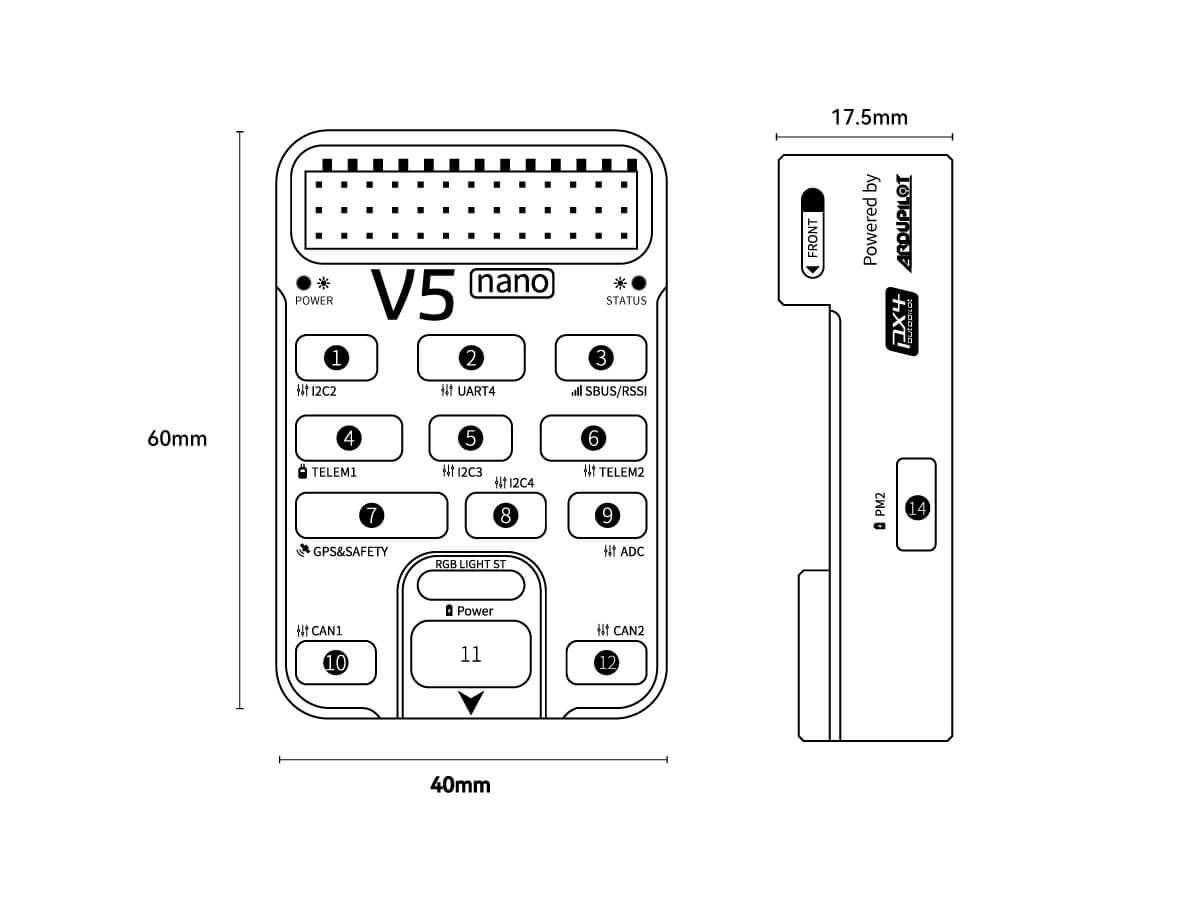
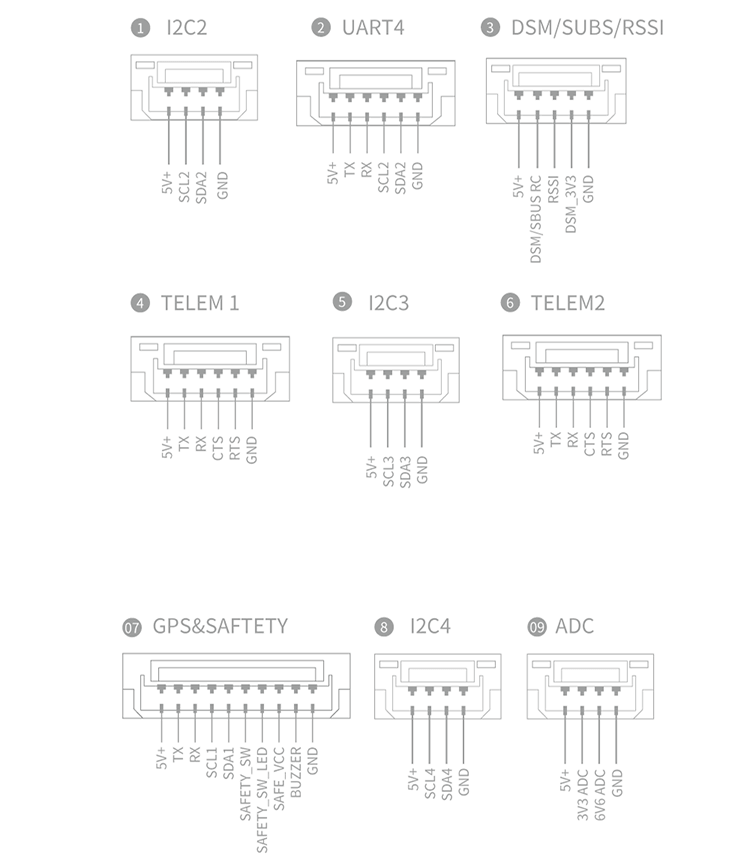
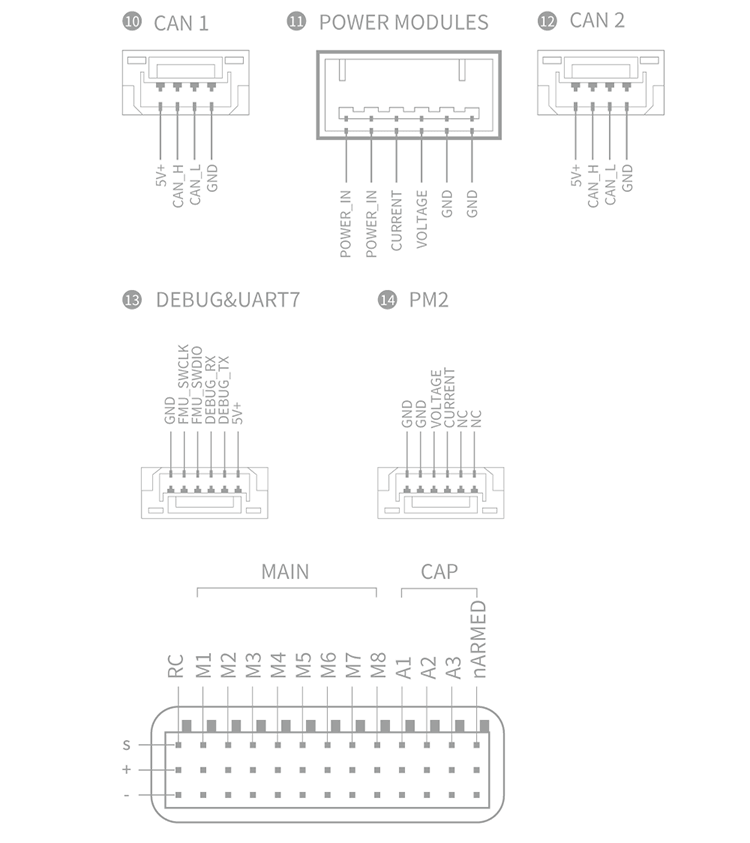
CUAV V5 nano 智能控制器 多传感器冗余组合;一体化设计,更小更轻;多传感器冗余组合,支持故障切换; 性能仍旧强大 V5 nano 在设计上机身比 V5+ 智能控制器相比虽然更小,但性能上却没有打折扣配备了高性能的 STM32F765 处理芯片,同时搭载有四组全接口隔离保护芯片,有效避免静电击穿以及 IO 电平不兼容击穿主控问题。 STM32F765 4 组隔离芯片 MS5611 气压计 MS5611 气压计 IST8310 电子罗盘 BMI055 加速计&陀螺仪 ICM-20602 加速计&陀螺仪 ICM-20689 加速计&陀螺仪 多传感器冗余组合 内置五组传感器,智能控制器实时监控多路传感器数据,一旦出现故障立即执行冗余切换,提高安全性与稳定性。 定制 2.6mm 间距IO 为 V5 nano 定制 2.6mm 间距 IO,解决多个接口拥挤,难拆装的问题。 2.6mm 尺寸图 接口定义 ArduPilot、Dronecode、PX4 长期合作伙伴 广州雷迅创新科技股份有限公司是一家以无人开源系统创新技术为向导,集成研发、生产、销售、售后、技术支持为一体的国家级高新技术企业和广东省专精特新企业,与 ArduPilot、Dronecode、PX4 是长期合作的友好关系。 支持 ArduPilot、FMT 和 PX4 固件 采购联系 李小姐 联系电话: 18122367336 覃小姐 联系电话: 18028643650 技术支持 电子邮箱: support@cuav.net 产品反馈 电子邮箱: pm@cuav.net 活动联系 电子邮箱: events@cuav.net 前往购买 下载中心 文档中心 产品使用范围声明