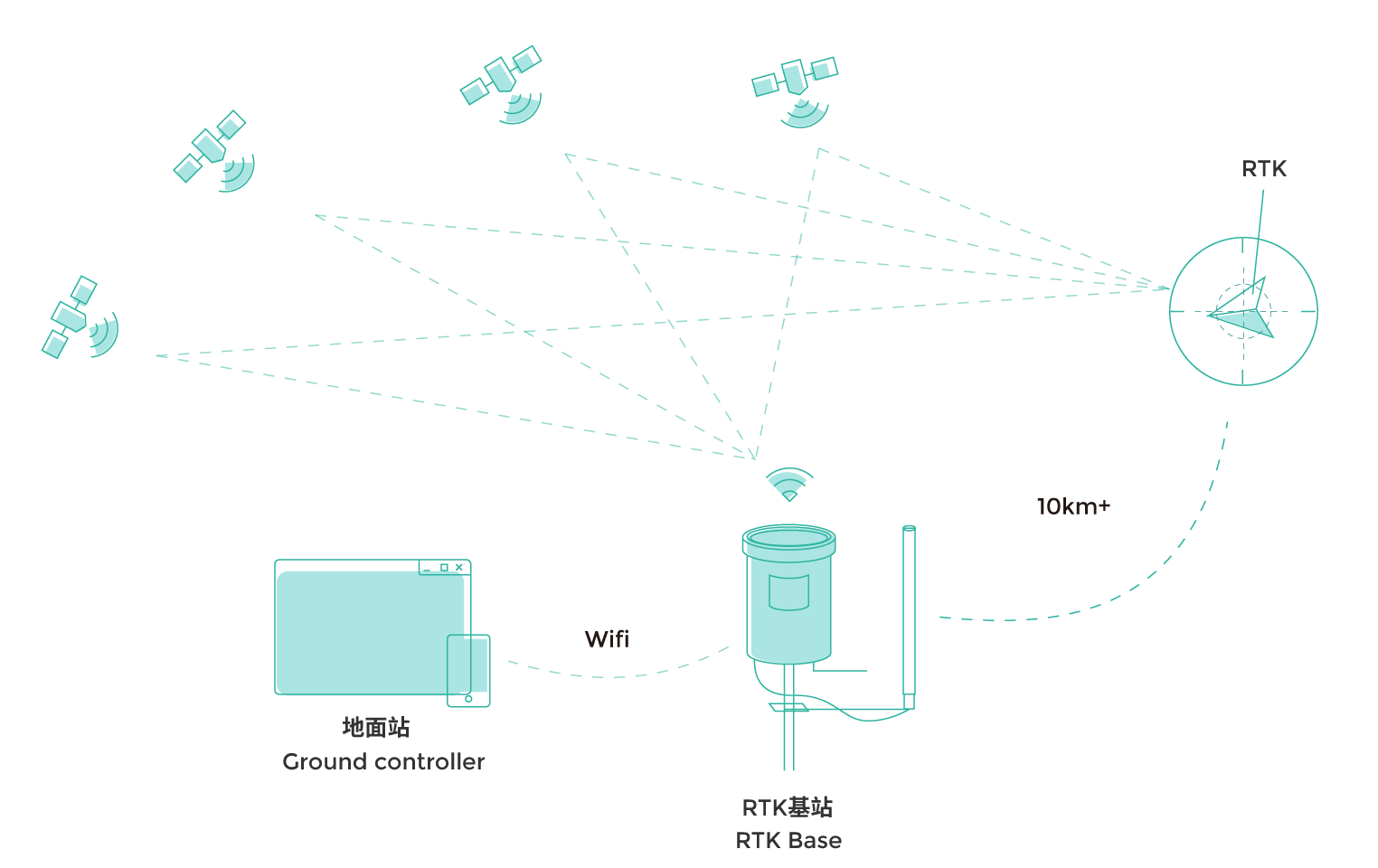
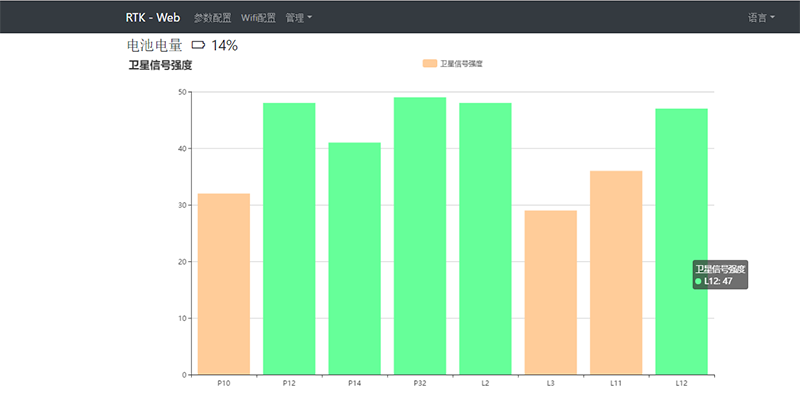
C-RTK Base基站 C-RTK-BASE差分高精度GPS基站系统,内置了多星单频RTK接收模块,P9超视距数据传输模块,WIFI通讯模块,高容量电池组可连续工作12小时,并运行着Linux系统,多种工作模式,可灵活应用到无人机、无人车等领域。 已停产 立即购买 产品介绍 /C-RTK Base基站 运行LINUX系统 CUAV RTK-BASE采用ARM芯片架构并运行了LINUX系统,通过可靠和灵活的LINUX系统,可以扩展满足不同行业用户需求的应用。 内置电池 内置了7000mAh 7.4V容量电池以及PMU电池管理芯片,依靠内部电池可连续工作12小时,支持12V直接充电,并很容易扩展外部太阳能充电,实现7X24小时运行。 内置16G存储 内置了16G存储空间,可以通过后期扩展存储基站RTK原始观测数据,用于后差分运算等。 集成OLED显示屏 C-RTK-BASE集成了OLE D显示屏,通过OLED显示屏可以显示当前运行模式、电量状态、RTK状态以及相关无人机状态。 C-RTK Base基站工作原理图 内置Web服务器 通过WIFI即可访问RTK-BASE WEB管理界面,通过WEB管理界面,可以实时查看RTK信号状态,电量信息,并可以对RTK运行模式、参数和P9数传进行相应配置,还可以对RTK-BASE进行升级还原操作。 2种工作模式-覆盖百种应用场景 RTK广播模式 RTK-BASE将接收到的RTK原始数据,通过内置数传以广播的方式,发送到同一群组内的无人机进行接收,接收数据的无人机不受数量限制,内置P9数传最远可到30KM,内置RTK模块基线长度最远可到10KM。 无人机单点模式 RTK-BASE将接收到的RTK原始数据与mavlink进行封装,并通过WIFI发射热点,用户即可通过手机或者电脑地面站直接与无人机连接通讯,而无人机也可以直接接收RTK和mavlink交互数据。 农业植保 娱乐表演 IP65级防护 IP65级的防护使得产品更能胜任严酷的作业环境。 规格参数 /C-RTK Base基站 资料下载 /C-RTK Base基站 技术参数 工作模式 点对点 支持卫星类型 GPS L1 C/A, GLONASS L1OF, BeiDou B1I 配置类型 WEB界面 RTK刷新率 最大10hz RTK接收通道 72-channel u-blox M8 engine (M8P + M8N) 定位精度 3D定位(3D FIX):2.5 m; 差分定位(RTK) :0.025 m Convergence time 2 RTK < 60 sec 灵敏度 Tracking & Nav –160 dBm Cold starts –148 dBm Hot starts –156 dBm Reacquisition –158 dBm 支持飞控协议 Mavlink 2.0/1.0 内置存储空间 16GB 工作环境和物理参数 充电电压 9~12v 内置电池容量 7.4v 7000Mah 电池可工作时间 12小时 工作电流 12V/1.5A MAX 工作温度 -10°~ +60° 尺寸 60mm x 115 外壳材质 6063 航空铝+ABS+PC 天线接口类型 SMA内孔 屏幕类型 OLED 自发光 150*150 分辨率 接口类型 充电接口 非标准 DC3.5*1.35 扩展接口 RJ45网口×1 TTL串口×2 TYPE-C USB×1 9天线扩展×1 WIFI天线扩展×1 C-RTK Base基站产品说明书