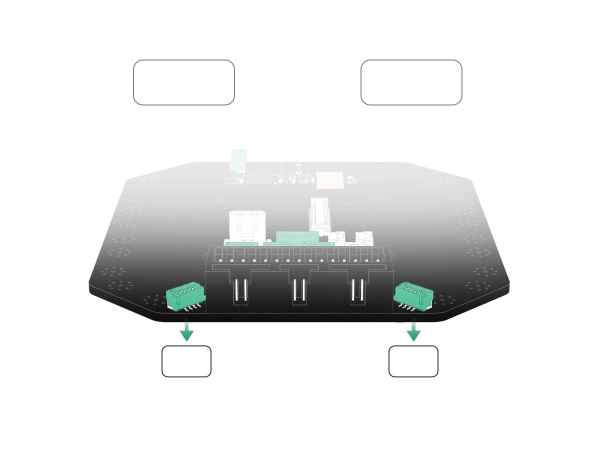
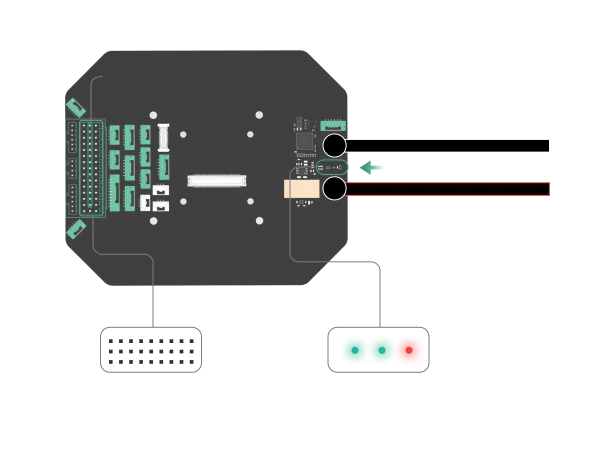
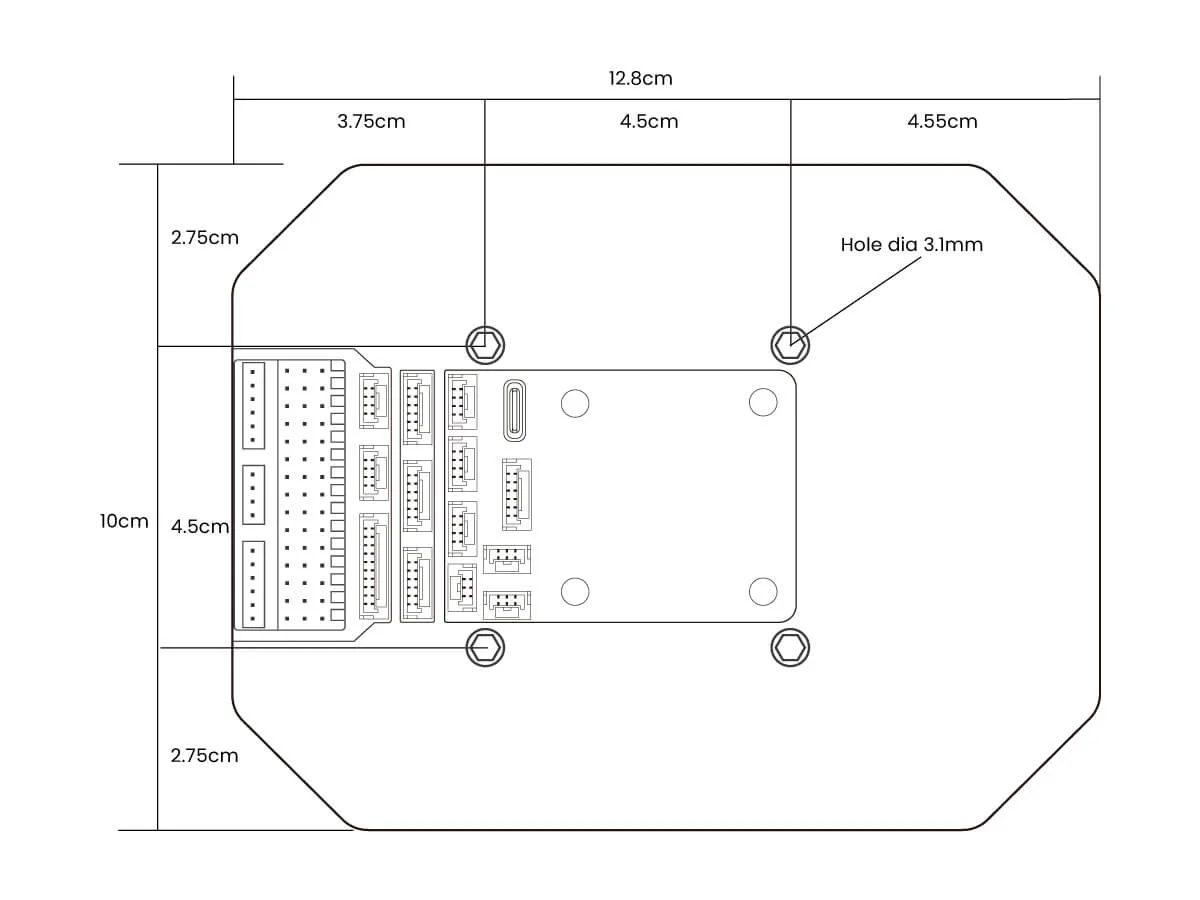
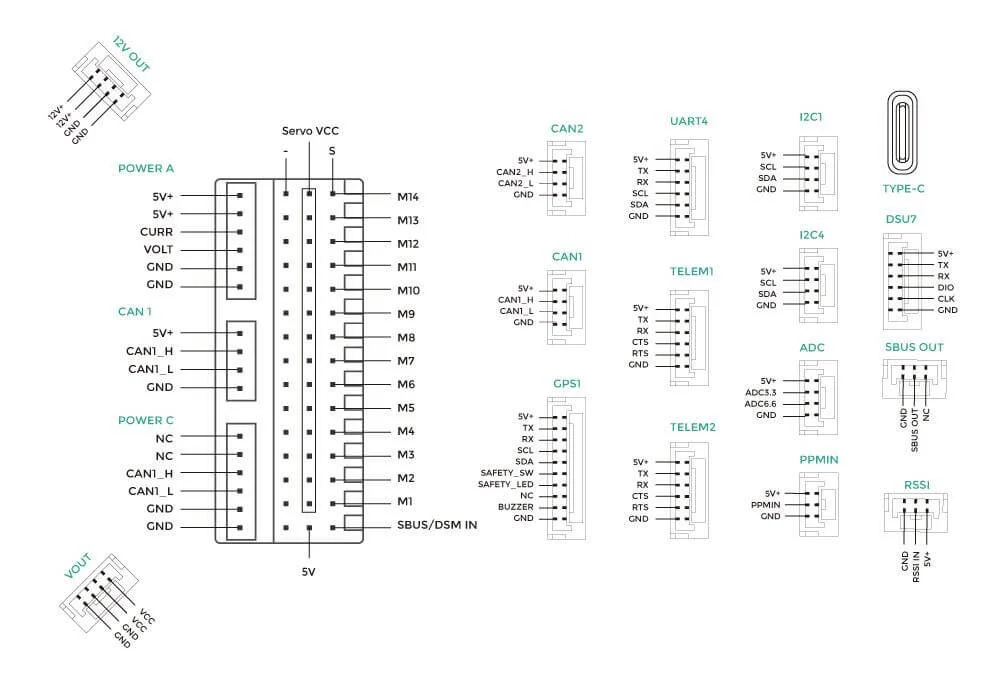
CAN PDB 控制器多功能主板 支持 V5+、X7+、X7+ Pro Core 核心模块0.05V 0.1A 测量精度;最大支持 62V 电压输入,110A 电流检测;自研 ITT 算法; 支持 V5+、X7+、X7+ Pro Core 核心模块 CAN PDB 是控制器 CORE 的多功能主板,为控制器提供丰富的接口,并集成电源模块与分电板的功能,支持 14V ~ 62V 电压输入,并提供高达 110A 的持续工作电流。采用自研的 ITT 算法,拥有 0.1A、0.05V 的电源检测精度,媲美精密仪器的测量精度。拥有 10 路电源输出焊接点,并提供一个 5V 和一个 12V/4A 稳压输出,为您的外接设备提供电源。支持 V5+、X7+、X7+ Pro 控制器的 Core 模块。 0.1A 0.05V 电源检测精度 UBEC 稳压输出 12V/4A VOUT 5V(默认)/7.4V/8.2V(最大支持 4A 负载) 110A 持续电流 精准测量电压电流 宽压输入,状态直观 14V ~ 62V 输入 状态直观展示 14 个 PWM 通道输出 Servo VCC:5V(默认)/7.4V/8.2V(最大支持 8A 负载) 尺寸图 接口定义 ArduPilot、Dronecode、PX4 长期合作伙伴 广州雷迅创新科技股份有限公司是一家以无人开源系统创新技术为向导,集成研发、生产、销售、售后、技术支持为一体的国家级高新技术企业和广东省专精特新企业,与 ArduPilot、Dronecode、PX4 是长期合作的友好关系。 支持 ArduPilot 和 PX4 固件 采购联系 蔡丹丹 负责区域:华南大区 联系电话: 18589212137 联系邮箱: tina.cai@cuav.net 梁来娣 负责区域:华东&西北大区 联系电话: 18588539237 联系邮箱: lindy.liang@cuav.net 劳兴凤 负责区域:华北&东北大区 联系电话: 18589239132 联系邮箱: Laura.lao@cuav.net 覃春丽 负责区域:华中&西南大区 联系电话: 18028643650 联系邮箱: chunli@cuav.net 技术支持 电子邮箱: support@cuav.net 产品反馈 电子邮箱: pm@cuav.net 活动联系 电子邮箱: events@cuav.net 前往购买 下载中心 文档中心 产品使用范围声明