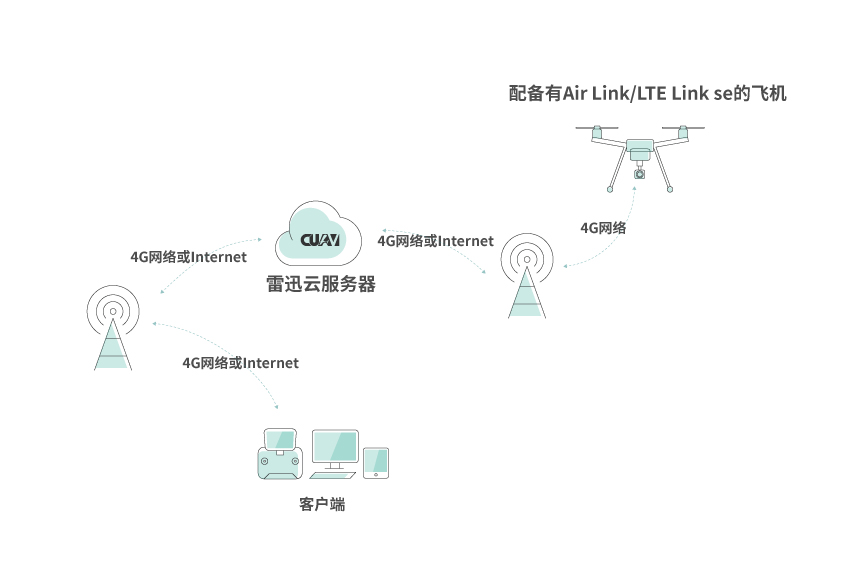
概述 规格参数 购买 下载 使用教程 回顶部 Nora控制器 Nora是由CUAV设计和生产的高级自动驾驶仪;它采用比PX4上一代控制器(FMUv5)更高性能的STM32H7系列处理器,并集成高精度工业级传感器和超低温飘传感器,相较于上一代控制器性能更好、更稳定可靠 不止是更快 Nora系列控制器采用STM32H7系列处理器,CPU运行频率提升至480Mhz、RAM 1024K,FLASH 2048K,拥有更快的处理器和更大运存,并采用512K EEPROM,可以扩展航点到2048个,应对行业应用游刃有余。 稳定始终如一 采用Invensense+ Bosch+ADI+TE 最新系列传感器,拥有更低的噪声和更强的抗冲击和震动性能,并内置了工业级罗盘RM3100在稳定性和抗干扰性带来了质的提升 适应严酷环境 x7系列飞控采用了大量车规级别芯片,并内置了高精度传感器温补系统,使得传感器在恒温的状态下进行工作,确保传感器在高低温环境下均能 高精度、高灵敏度的稳定运行。 一体化设计 Nora控制器 采用一体软硬结合Pcb设计,整体结构一体贴片成型,没有任何二次焊接和插装零件,确保硬件结构达到最高可靠性。 支持LTE Link通迅模块 CUAV全系列控制器均支持LTE Link系列通迅链路,以4G、5G网络进行通迅,支持实时高清视频传输与视频共享,团队管理功能,实现无人系统权限的分配。 LTE Link系列产品工作原理图 选配C-RTK获得厘米级定位 通过选配C-RTK系列高精度定位模块,扩展厘米级定位功能,以满足测绘,植保等高精度定位的应用场景。 双平台兼容 支持现在主流的PX4(PX4正在造配中)和Ardupilot两个开源平台固件, 满足不同用户需求。 标配数字PMU电源模块 标配UAVCAN协议数字CAN PMU SE数字电源检测模块,内置CUAV自主研发ITT 算法,助力精准测量无人机实时电压和电流,让无人系统运行时间估算更可靠。 CAN PMU SE最大支持60V/80A输入和测量,电压和电流精度达到+-0.15V/0.2A,并可选配更高精度的CAN PMU CUAV品质 CUAV 深度与APM & PX4团队合作,共同完成了CUAV X7系列的硬件设计和软件适配工作,并由CUAV 智慧工厂进行生产和测试,每一个控制器均通过自主研发CUAV AATS系统进行I/O联通性和传感器稳定性检验,确保控制器的稳定可靠 X7系列与V5+kong'zh'qii对照表 V5+ X7 Nora X7 Pro Processors STM32F765+STM32F1 STM32H743 STM32H743 STM32H743 传感器 6-Axis: 6-Axis: 6-Axis: 6-Axis: ICM20689 ICM20689 ICM20689 ADIS16470 ICM-20602 ICM-20649 ICM-20649 ICM-20649 BMI055 BMI088 BMI088 BMI088 Compass: Compass: Compass: Compass: IST8310 RM3100 RM3100 RM3100 Barometer: Barometer: Barometer: Barometer: MS5611 MS5611 MS5611 MS5611 MS5611 MS5611 MS5611 MS5611 主处理器频率 216MHZ 480MHZ 480MHZ 480MHZ 内存 512K 1024K 1024K 1024K 闪存 2048K 2048K 2048K 2048K PWM OUT 8+6 14 14 14 基本IO UART*5I2C*4CAN*2RSSI*1 DEBUS*1SPI*1ADC IN*2SBUS OUT*1 UART*5I2C*4FDCAN*2RSSI*1 DEBUS*1SPI*1ADC IN*2 UART*5I2C*4FDCAN*2RSSI*1 DEBUS*1SPI*1ADC IN*2 UART*5I2C*4FDCAN*2RSSI*1 DEBUS*1SPI*1ADC IN*2 电源检测模块 ADC模拟 数字CAN PMU SE 数字CAN PMU SE 数字CAN PMU SE EEPROM 256K 512K 512K 512K 尺寸 85.5×42×33 77×45.5×39 64×46×22 77×45.5×39 自定义载板 支持 支持 不支持 支持