V5+ selects the STM32F765 processor with better performance. Its main frequency is up to 216MHz and it contains 2MB FLASH/512KB RAM. The clock speed is higher, the RAM is larger, and the speed will be greatly improved.
MS5611
Barometer
IST8310
Compass
BMI055
Acc & Gyro
ICM-20602
Acc & Gyro
ICM-20689
Acc & Gyro
Multi-sensor redundancy combination
Built-in 5 sets of sensors, the Autopilot monitors the multi-channel sensor data in real time, and performs redundant switching immediately after the failure, improving safety and stability.
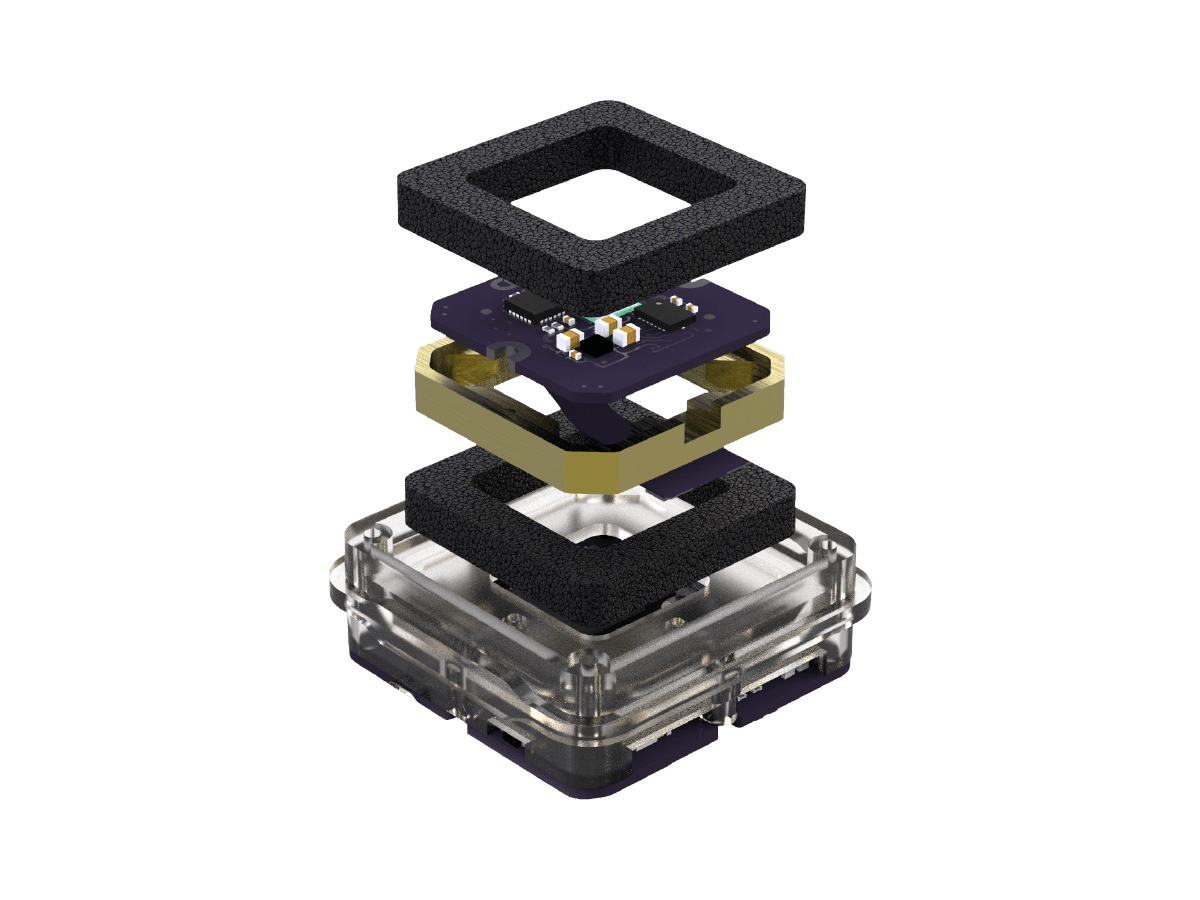
Patented Built-in Shock Absorption System
Sensors and mainboards adopt a separated design, integrated with a high-performance vibration damping system, enabling adaptation to various severe equipment environments and offering enhanced adaptability.
Support RTK centimeter positioning
V5+ supports RTK positioning module to achieve accurate centimeter positioning to meet your higher positioning requirements.
(RTK positioning module needs to be purchased separately)
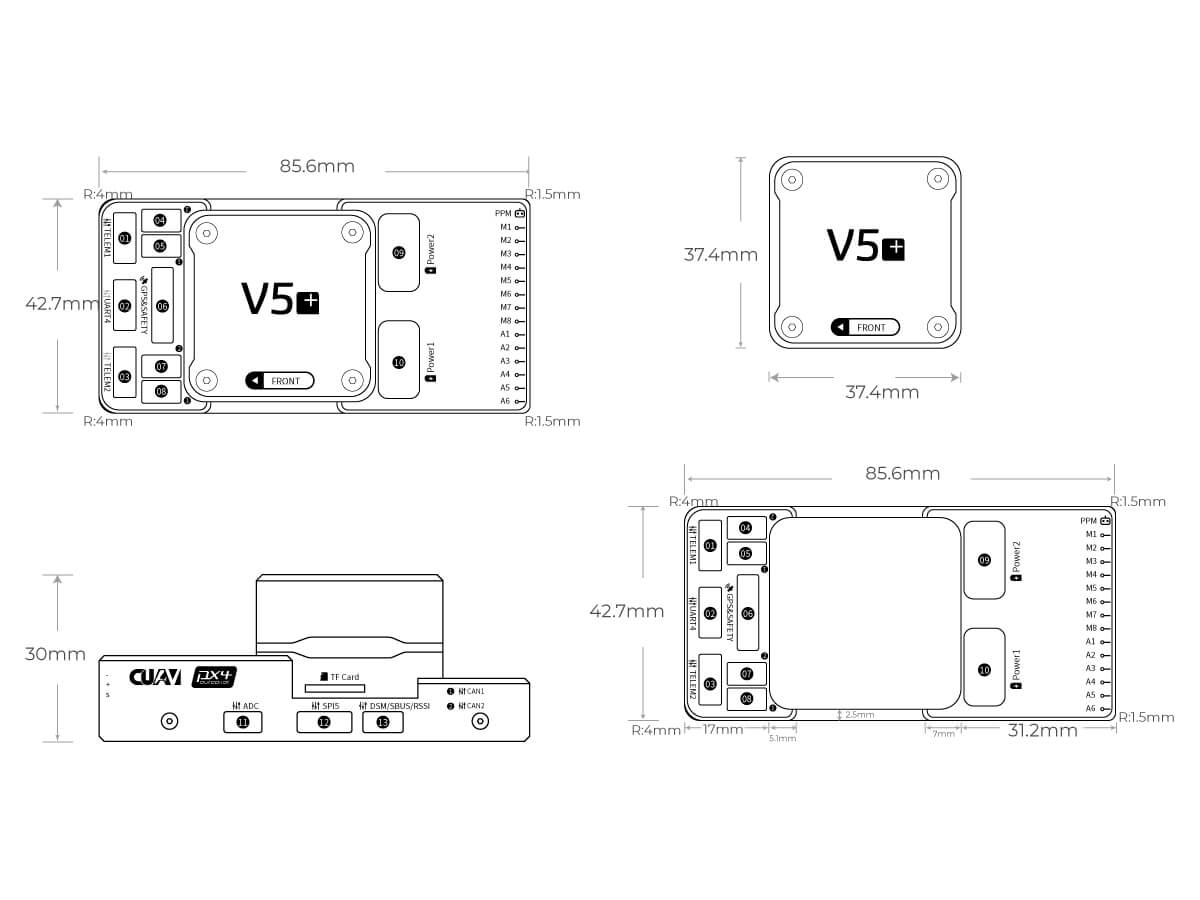
Dimensions chart
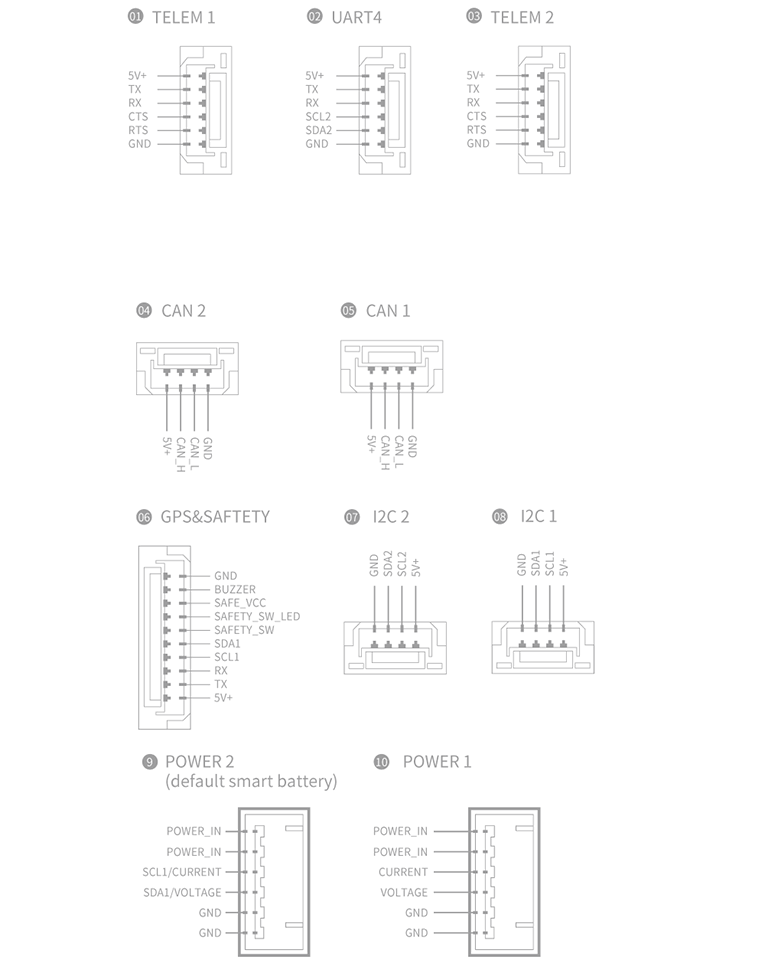
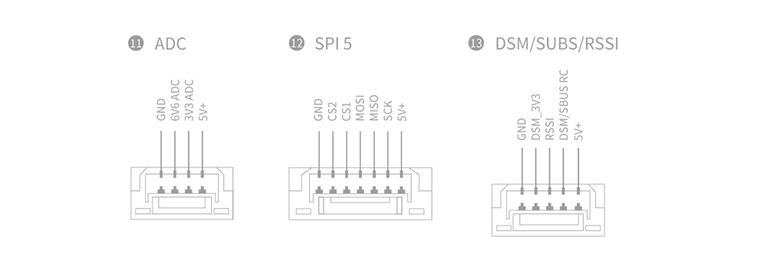
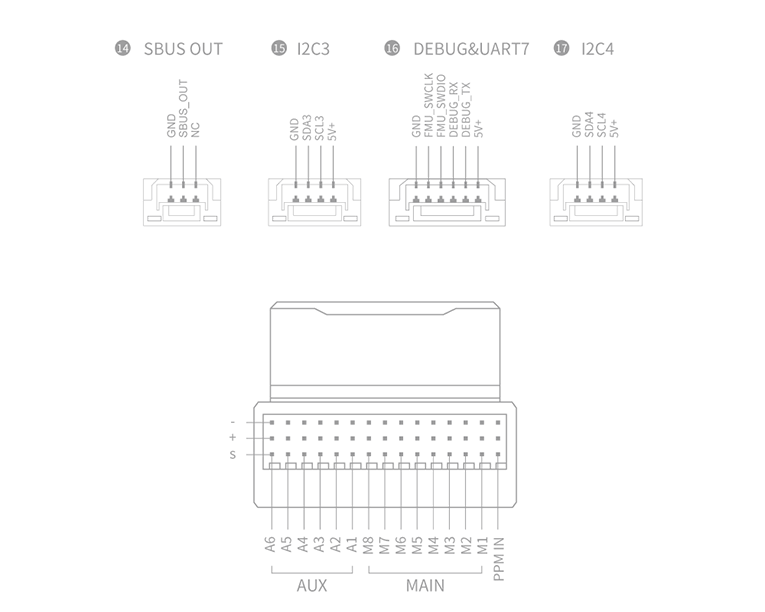
Pinouts
ArduPilot, Dronecode, and PX4 Long-Term Partners
CUAV Technology Co., Ltd. is a National High-Tech Enterprise and Guangdong Provincial Specialized, Sophisticated, Innovative SME that focuses on open-source unmanned system innovation technologies. It integrates R&D, production, sales, after-sales service, and technical support into a cohesive operation. The company maintains long-term collaborative partnerships with leading open-source organizations such as ArduPilot, Dronecode, and PX4.