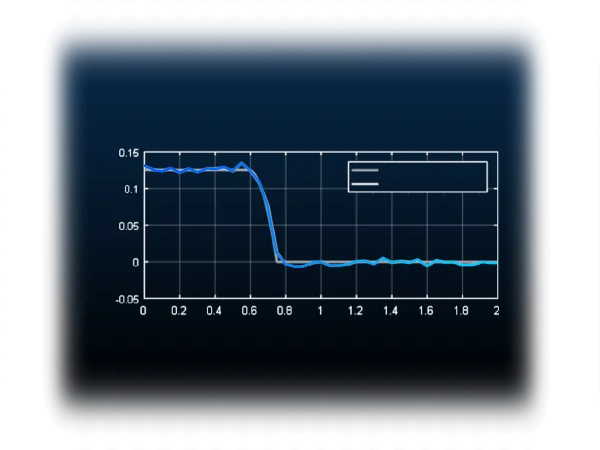
厘米级 RTK 定位精准,水平精度可达 0.6 cm + 0.5 ppm,垂直精度可达 1 cm + 1 ppm,初始化时间仅 7 秒。同时适配 Standalone, DGNSS 等多种定位模式,速度精度达 3 cm/s,用户可根据环境与任务切换模式,满足无人系统设备在复杂动态环境下的厘米级定位与姿态感知需求。
内置 789 个硬件通道,同步接收 GPS、GLONASS、北斗、Galileo、QZSS 信号,显著提升信号捕获能力,确保在楼宇遮挡、林荫覆盖等信号受限环境中依然保持可靠定位。兼容 Galileo HAS 精度服务,前瞻性功能可通过固件更新持续升级,保持技术前沿性。
业内首次在 GNSS 定位模块集成 CAN FD 总线,相较传统 CAN,数据段速率由 1 Mbps 提升至 8 Mbps。优化 ArduPilot / PX4 固件支持,让 20 Hz 刷新率不仅限于 GNSS 模块性能,显著提升导航精度。
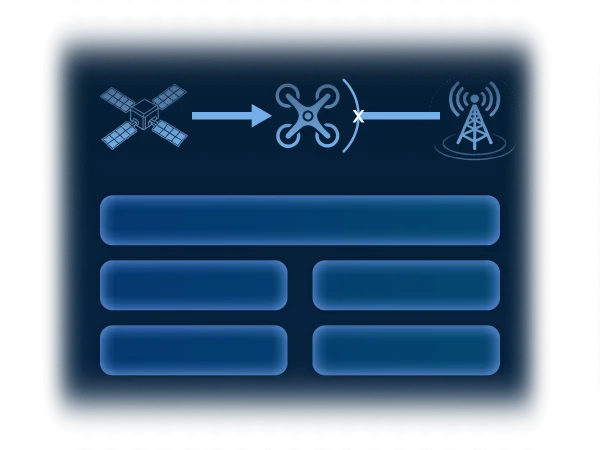
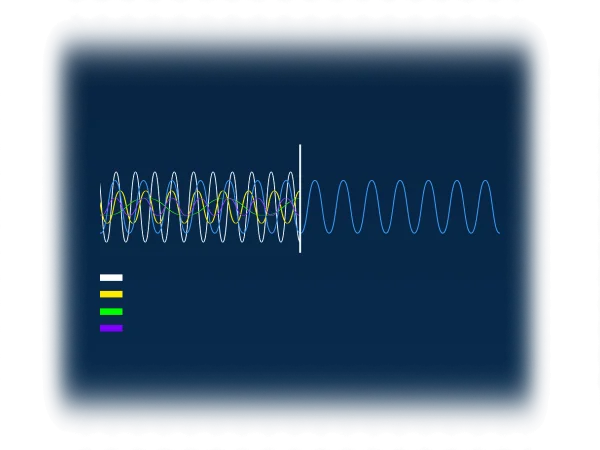
依托 AIM+ 探测技术,根据欺骗信号的异常特征、空时与空频验证、多星座卫星交叉验证等对卫星可靠性进行分级标记与剔除。 并且引入 OSNMA 卫星安全认证机制,全方位防止人造信号的欺诈。
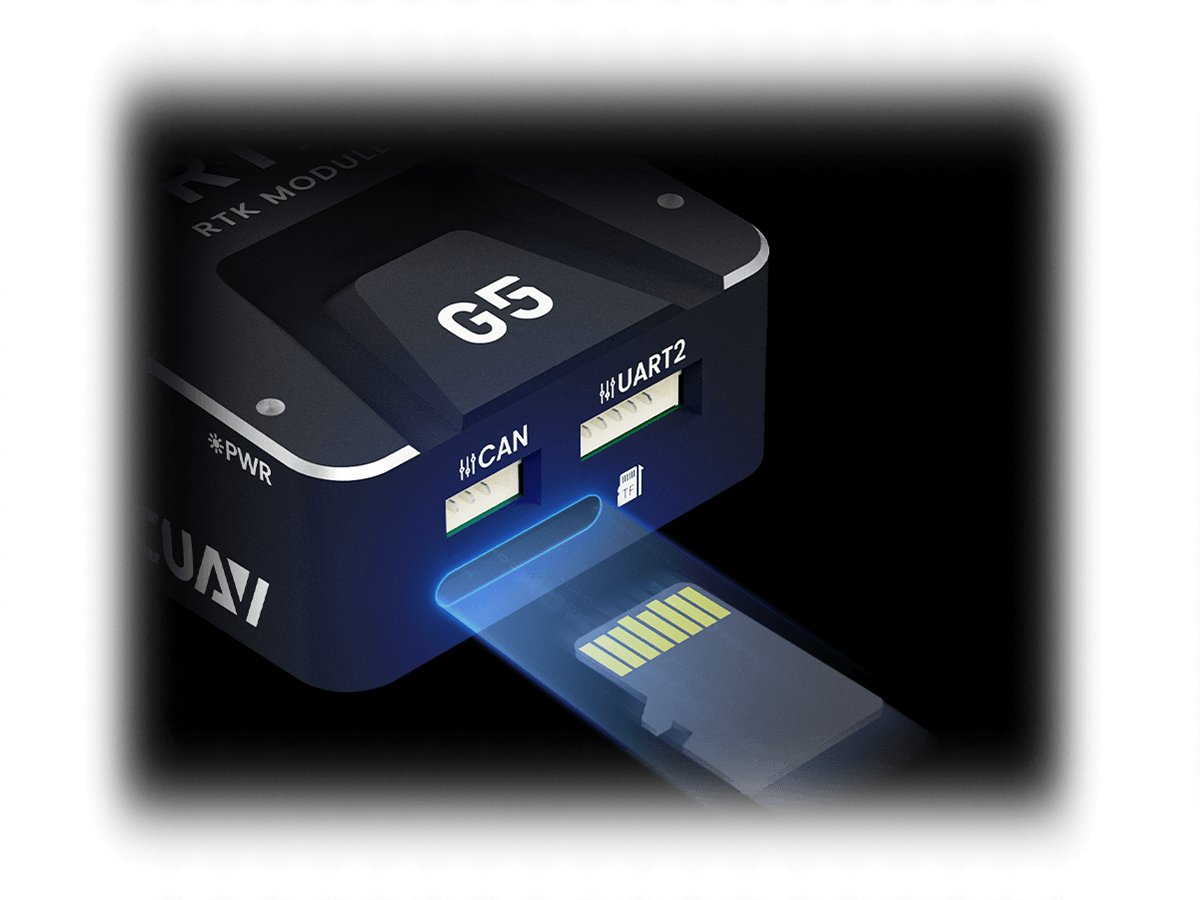
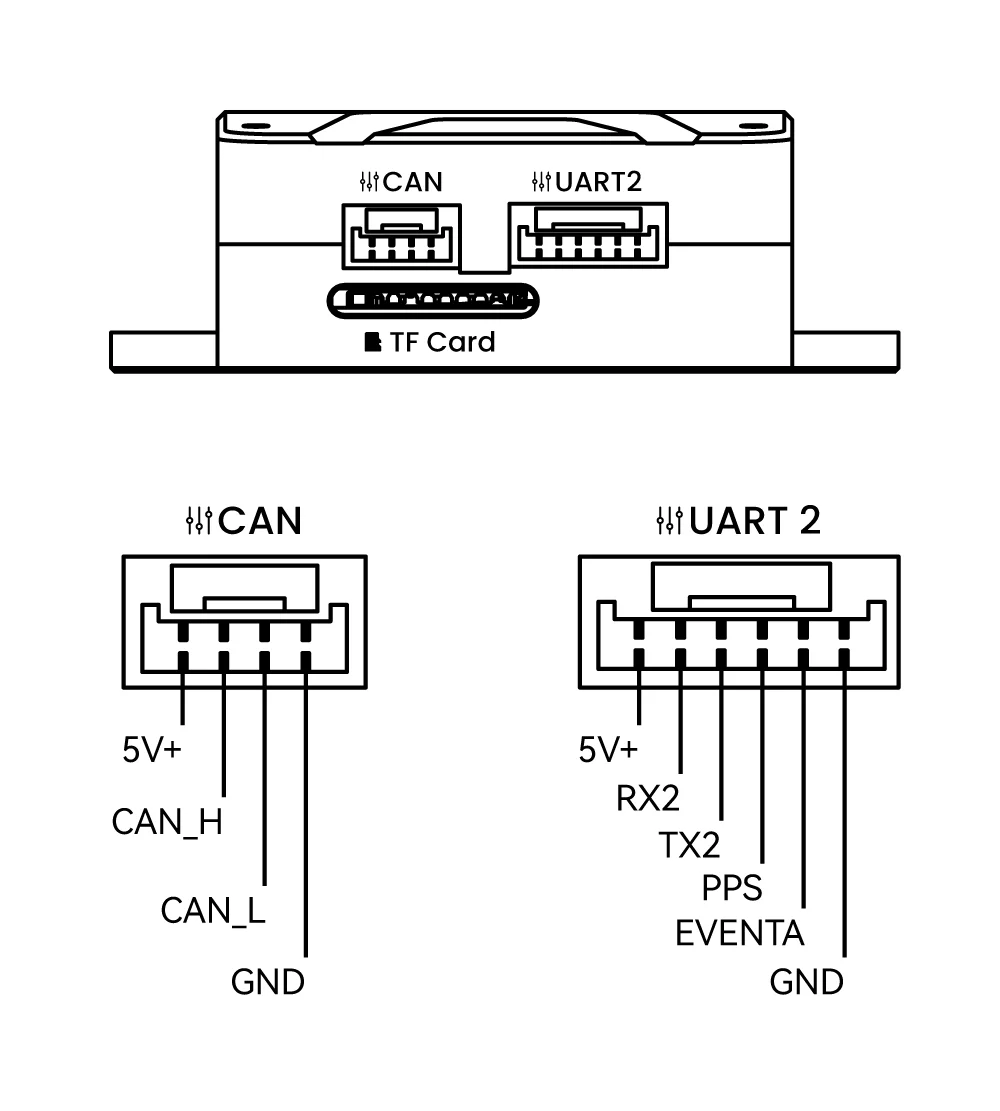
配置 1 路 CAN、1 路 UART、USB 2.0 HS 接口,集成度高,接口丰富。采用 DroneCAN 通讯协议,全面兼容 ArduPilot 和 PX4 等主流开源平台,搭配 CUAV 开源控制器,适用于需要厘米级定位且可靠性较高的无人船、机器人、多旋翼、垂直起降固定翼、直升机等自主无人系统设备
广州雷迅创新科技股份有限公司是一家以无人开源系统创新技术为向导,集成研发、生产、销售、售后、技术支持为一体的国家级高新技术企业和广东省专精特新企业,与 ArduPilot、Dronecode、PX4 是长期合作的友好关系。