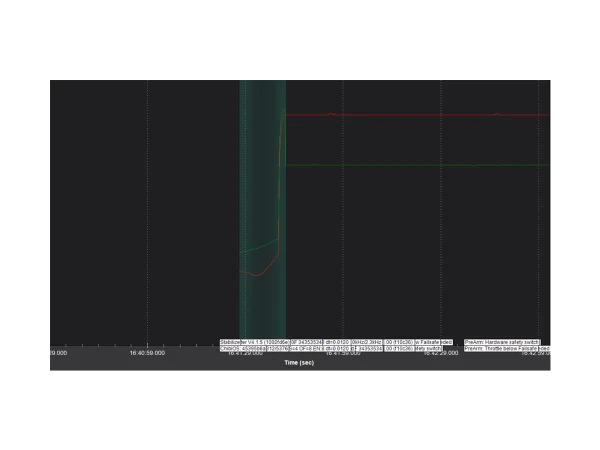
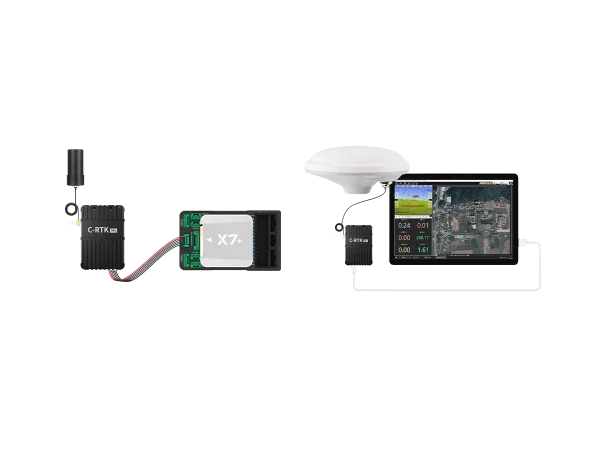
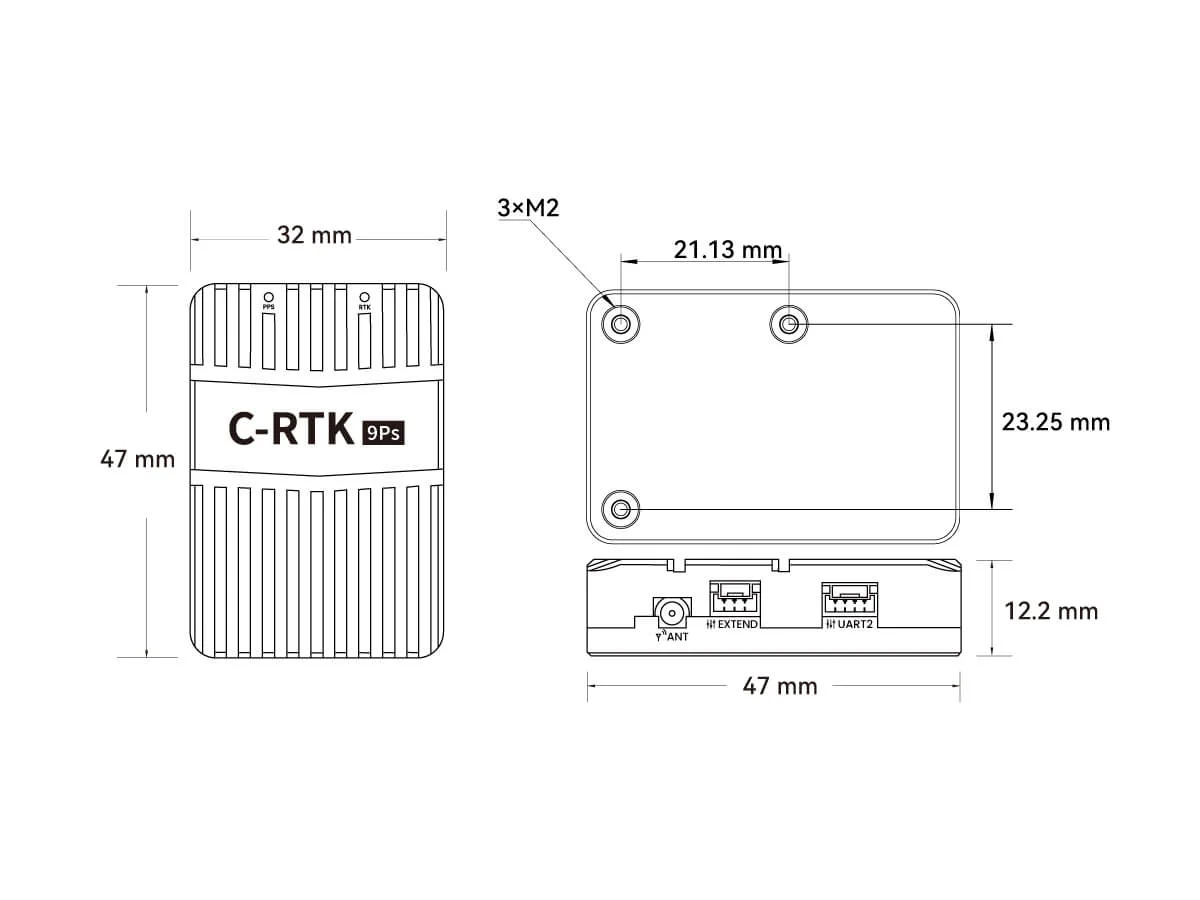
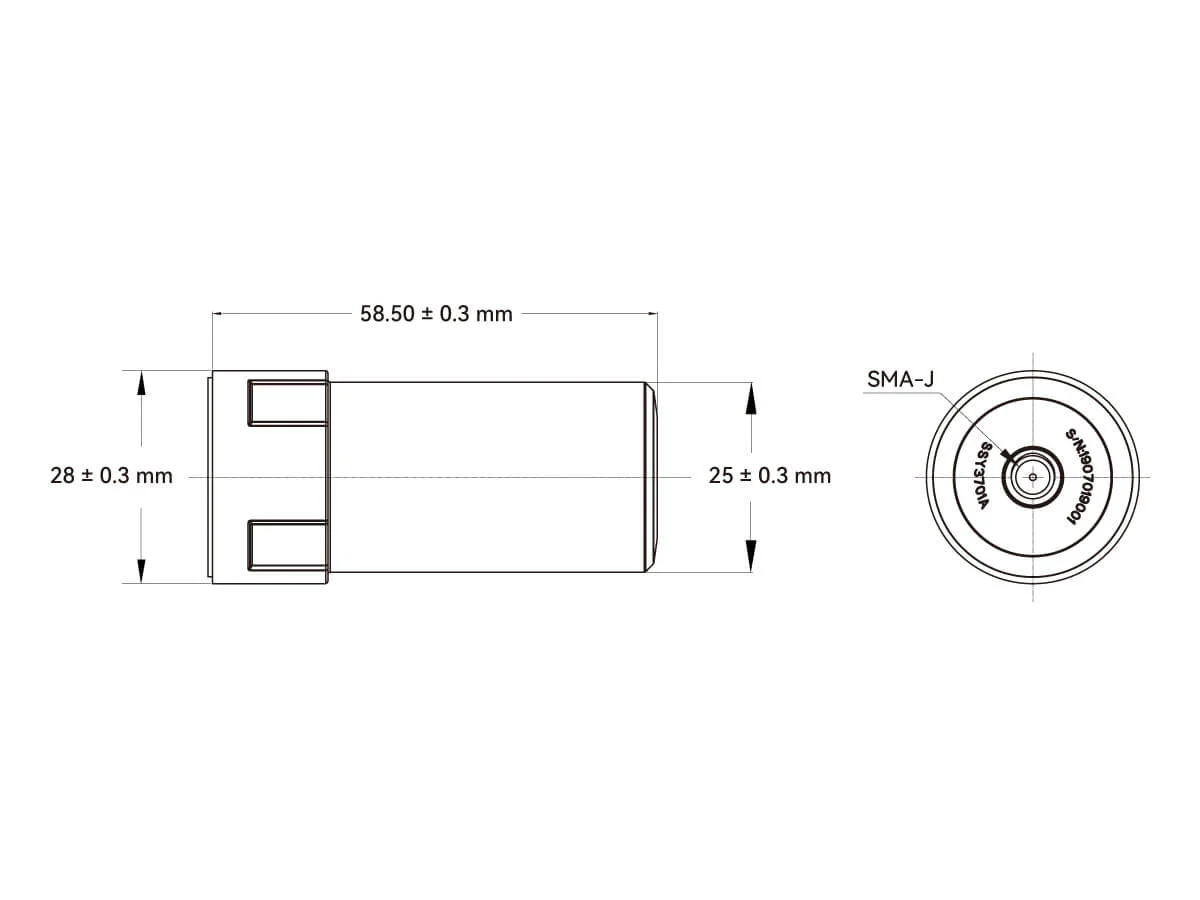
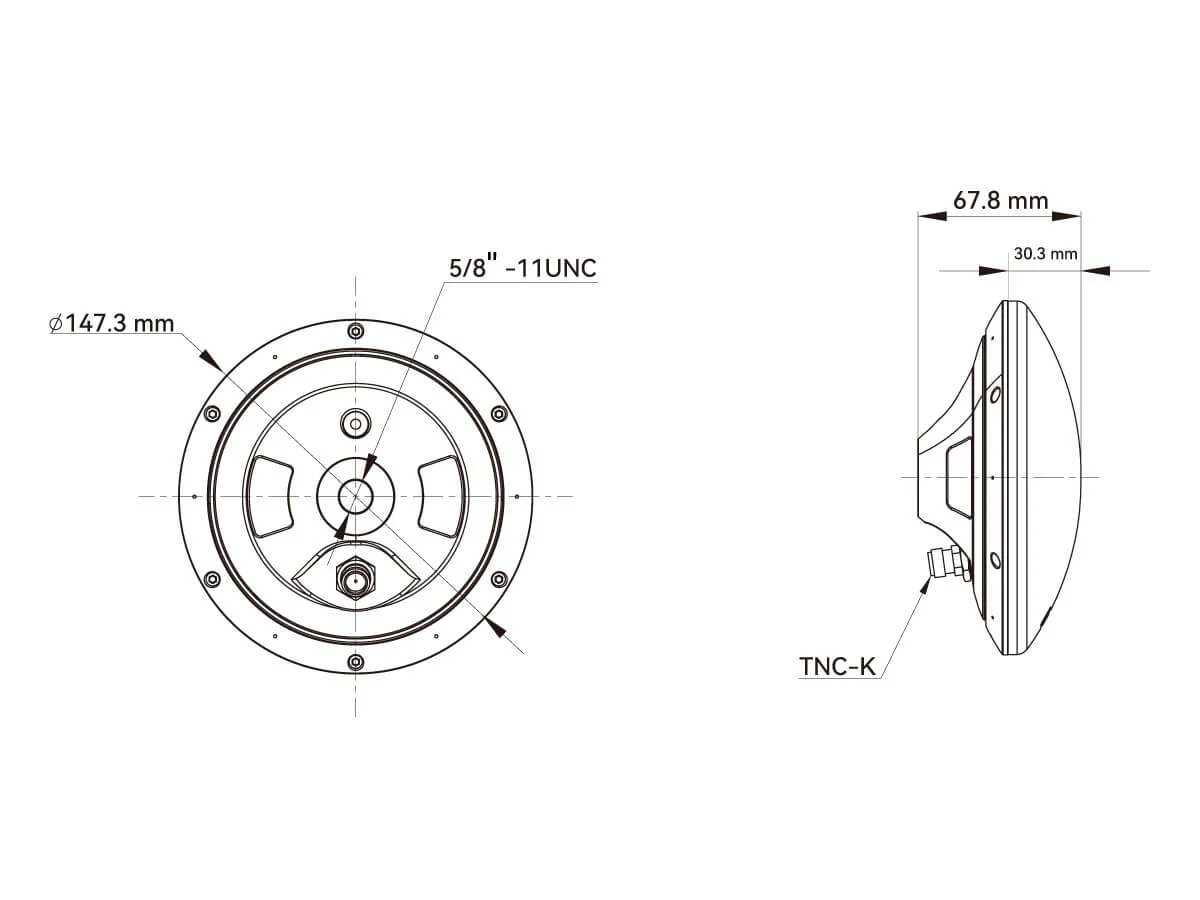
C-RTK 9Ps 定位模块 多星多频接收机;双模块测向;双端切换; 多星多频高精度定位 内置 u-blox F9P 多星多频卫星接收机,支持北斗、伽利略、格洛纳斯、GPS 四大卫星系统, 并支持四卫星系统同时接收, 定位精度 RTK 0.01m + 1ppm CEP。 GPS 格洛纳斯 伽利略 北斗 收敛时间 ≈ 14s 疾速定位,无需等待 通过多星多频的 GNSS 信号并结合先进的 RTK 算法,使其基站端能够在十几秒内完成收敛并向移动站发送差分数据。 双天线测向,适应复杂环境 移动端使用两个 C-RTK 9Ps 可以实现双天线测向功能,代替无人系统中的磁罗盘,使无人系统能够在电力巡检等复杂的电磁环境中稳定工作。 作为移动端使用 作为基站端使用 双端快速切换 C-RTK 9Ps 定位系统采用双端(基站端和移动端)相同设计,并且双端均采用相同固件,您只需加载不同的配置参数即可完成快速切换。 尺寸图 ArduPilot、Dronecode、PX4 长期合作伙伴 广州雷迅创新科技股份有限公司是一家以无人开源系统创新技术为向导,集成研发、生产、销售、售后、技术支持为一体的国家级高新技术企业和广东省专精特新企业,与 ArduPilot、Dronecode、PX4 是长期合作的友好关系。 支持 ArduPilot 和 PX4 固件 采购联系 李小姐 联系电话: 18122367336 覃小姐 联系电话: 18028643650 技术支持 电子邮箱: support@cuav.net 产品反馈 电子邮箱: pm@cuav.net 活动联系 电子邮箱: events@cuav.net 相关视频 前往购买 下载中心 文档中心 产品使用范围声明